 Xan
Xan

 инфо
инфо инструменты
инструменты Anzoriy
Anzoriy



 a_centaurus
a_centaurus

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/mi/mikroe/img/development-tools/pic/easypic_v7/128x128-crop/thumb_easypic_v7.png)
Кобра III
Теги:
Xan>> Для кардана можно было б сделать то, что нарисовано справа (в центре - светодиод).
Non-conformist> Ты про зеркальце?
Нет, про рассеивающее что-то.
Белая полоска.
Non-conformist> Начертил схему. Вопрос: а VD4 вроде как по постоянке получается прямосмещенным через R1 - R5 - R4? Я в том смысле, что вроде как VD3 и VD4 по постоянке как бы в разных условиях находятся? Это дело мост не перекосит? И подойдут ли такие номиналы для делителя R1-R2?
Один ответ у тебя уже есть.
Насчёт номиналов — надо знать, какие токи фотодиодов ожидаются. Чтоб токи через резисторы были меньше самых маленьких токов фотодиодов. Иначе логарифмичность хорошая не получится.
Возможно, лучше взять/сделать инструментальник.
На мой взгляд, на порядок-полтора номиналы можно увеличить. Главное лаком потом плату замазать.")
Non-conformist> Ты про зеркальце?
Нет, про рассеивающее что-то.
Белая полоска.
Non-conformist> Начертил схему. Вопрос: а VD4 вроде как по постоянке получается прямосмещенным через R1 - R5 - R4? Я в том смысле, что вроде как VD3 и VD4 по постоянке как бы в разных условиях находятся? Это дело мост не перекосит? И подойдут ли такие номиналы для делителя R1-R2?
Один ответ у тебя уже есть.
Насчёт номиналов — надо знать, какие токи фотодиодов ожидаются. Чтоб токи через резисторы были меньше самых маленьких токов фотодиодов. Иначе логарифмичность хорошая не получится.
Возможно, лучше взять/сделать инструментальник.
На мой взгляд, на порядок-полтора номиналы можно увеличить. Главное лаком потом плату замазать.


Non-conformist> Только разобью я это дело на две зарплаты
Да пожалуйста. Цены вообще выше, но для своих, сам понимаешь.
Non-conformist> 1. С каким минимальным зазором могут быть разделены заготовки колец?
А с каким надо? Вообще, есть минимум, при котором ширина колеца будет препятствовать вращению, с другой стороны - меньше зазор - меньше люфты.
Non-conformist> по 0,5 мм на радиус я оставил на чистовую обработку. Как будут разделятся кольца в ВАШЕМ случае?
Ну, сделаем специальный резец, типа расточного прямого с нужными параметрами и вперед. Чистовая обработка по диаметру в нашем случае может только навредить.
Non-conformist> 2. Внутренний диаметр внутреннего кольца. Туда с возможно меньшим люфтом должна заходить стандартная мебельная хромированная тонкостенная пятидесятимиллиметровая труба
целью точного установления максимального их диаметра (а также неравномерности диаметра вдоль трубы и эллипсности сечения)?
У меня на баконе валяются хорошие дюралевые трубы 51/1,5мм. Ее можно обточить до к примеру 50,5, тогда элипсности по наруже практически вообще не будет. Люфт - подгоним по виду посадки, т.е. как скажешь, это все вместе с трубой тебе на халяву сделать можно. Какая длина трубы?
Non-conformist> (если не ошибаюсь, система крепления с использованием этих труб называется "джокер".
Как это "джокер" - просвяти.
Non-conformist> 3. Собственно способ крепления двигателя в кардане. К заказу это не относится, просто мне интересно знать твое конструкторское мнение.
А как там все располагаться должно? Напиши, может резьбы где нарежем. В любом случае, это надо заранее обсудить. Поставь в кратцах задачу.
Non-conformist> Традиционным упариванием из сахарно-нитратного раствора. Ударным уплотнением заряда в подогреваемом корпусе-форме.
Чем короче двигатель, тем на больший угол его можно отклонить (при неизменных калибре двигателя и внутреннем диаметре трубы корпуса изделия).
Перед запуском, минимум штуки 3 испытать надо. Кстати, чем обусловленны такие размеры кардана и на какой странице фотка того, что Скона сделал?
Я как нибудь тебе пару-тройку своих движков пришлю, спалишь или пульнешь выскажишь свое мнение.
Да пожалуйста. Цены вообще выше, но для своих, сам понимаешь.
Non-conformist> 1. С каким минимальным зазором могут быть разделены заготовки колец?
А с каким надо? Вообще, есть минимум, при котором ширина колеца будет препятствовать вращению, с другой стороны - меньше зазор - меньше люфты.
Non-conformist> по 0,5 мм на радиус я оставил на чистовую обработку. Как будут разделятся кольца в ВАШЕМ случае?
Ну, сделаем специальный резец, типа расточного прямого с нужными параметрами и вперед. Чистовая обработка по диаметру в нашем случае может только навредить.
Non-conformist> 2. Внутренний диаметр внутреннего кольца. Туда с возможно меньшим люфтом должна заходить стандартная мебельная хромированная тонкостенная пятидесятимиллиметровая труба
целью точного установления максимального их диаметра (а также неравномерности диаметра вдоль трубы и эллипсности сечения)?
У меня на баконе валяются хорошие дюралевые трубы 51/1,5мм. Ее можно обточить до к примеру 50,5, тогда элипсности по наруже практически вообще не будет. Люфт - подгоним по виду посадки, т.е. как скажешь, это все вместе с трубой тебе на халяву сделать можно. Какая длина трубы?
Non-conformist> (если не ошибаюсь, система крепления с использованием этих труб называется "джокер".
Как это "джокер" - просвяти.
Non-conformist> 3. Собственно способ крепления двигателя в кардане. К заказу это не относится, просто мне интересно знать твое конструкторское мнение.
А как там все располагаться должно? Напиши, может резьбы где нарежем. В любом случае, это надо заранее обсудить. Поставь в кратцах задачу.
Non-conformist> Традиционным упариванием из сахарно-нитратного раствора. Ударным уплотнением заряда в подогреваемом корпусе-форме.
Чем короче двигатель, тем на больший угол его можно отклонить (при неизменных калибре двигателя и внутреннем диаметре трубы корпуса изделия).
Перед запуском, минимум штуки 3 испытать надо. Кстати, чем обусловленны такие размеры кардана и на какой странице фотка того, что Скона сделал?
Я как нибудь тебе пару-тройку своих движков пришлю, спалишь или пульнешь выскажишь свое мнение.


А.С.> VD3 через R6 тоже. Нет, диоды в одинаковом положении
Спасибо!
Спасибо!
Xan> 1. Двухосевой датчик с четырьмя сенсорами - отстой. При отклонении от нуля по одной оси, чувствительность по другой резко падает.
Пара вопросов по этому тезису.
1. А что же тогда "логарифмическая АРУ"? Не справится с такими колебаниями чувствительности?
1.1 Какое количество сенсоров будет оптимальным для двухосевого датчика?
1.1.1 В "Гелиостате" была испытана конструкция с полупрозрачным светорассеивающим экраном (тонкая бумага), опертым о светоделительную крестовину. Какие будут твои комментарии по ЭТОЙ конфигурации датчика? inverted_pendulum Градуировочная характеристика этого датчика не снималась.
Xan> И вот какие результаты по линейности сигнала
А как ты относишься к идее не гнаться за линейностью, а КОМПЕНСИРОВАТЬ ее за счет идентичности кривых двух сенсоров (направления и положения) одинаковой конфигурации (проинвертировав одну из этих кривых каскадом на единственном транзисторе, включенном по схеме ОЭ)?
Я вообще сейчас возлагаю надежды именно на пирамидальный датчик направления о четырех сенсорах (по паре на ось), с "логарифмической АРУ". Честно говоря, твое заявление об отстойности этой конфигурации меня несколько озадачило.
Пара вопросов по этому тезису.
1. А что же тогда "логарифмическая АРУ"? Не справится с такими колебаниями чувствительности?
1.1 Какое количество сенсоров будет оптимальным для двухосевого датчика?
1.1.1 В "Гелиостате" была испытана конструкция с полупрозрачным светорассеивающим экраном (тонкая бумага), опертым о светоделительную крестовину. Какие будут твои комментарии по ЭТОЙ конфигурации датчика? inverted_pendulum Градуировочная характеристика этого датчика не снималась.
Xan> И вот какие результаты по линейности сигнала
А как ты относишься к идее не гнаться за линейностью, а КОМПЕНСИРОВАТЬ ее за счет идентичности кривых двух сенсоров (направления и положения) одинаковой конфигурации (проинвертировав одну из этих кривых каскадом на единственном транзисторе, включенном по схеме ОЭ)?
Я вообще сейчас возлагаю надежды именно на пирамидальный датчик направления о четырех сенсорах (по паре на ось), с "логарифмической АРУ". Честно говоря, твое заявление об отстойности этой конфигурации меня несколько озадачило.
Non-conformist>> 1. С каким минимальным зазором могут быть разделены заготовки колец?
Anzoriy> А с каким надо? Вообще, есть минимум, при котором ширина колеца будет препятствовать вращению, с другой стороны - меньше зазор - меньше люфты.
Нет, люфты, наверное, тут ни при чем до зазоров между кольцами. Люфты останутся только подшипниковые, коль скоро подшипники будут запрессовываться в кольца, а В подшипники - запрессовываться оси (запрессованные в среднее кольцо). Никаких левых люфтов.
А вот насчет препятствия вращению - это есть такое. Тут такие соображения. Если есть возможность, то кольцевые (радиальные) зазоры между кольцами, наверное, имеет смысл уменьшить до технологически оправданного минимума. Но с другой стороны, их надо оставить достаточными для поворота колец друг относительно друга на угол не менее семнадцати-двадцати градусов. Полный оборот колец совершенно не нужен и даже мешает при наладке. Я думаю, что чуть больше двух миллиметров для этих зазоров будет "самое то". Завтра уточню по чертежу. А ты уточни у своих специалистов, с какими минимальными зазорами дюралевая плита двадцатимиллиметровой толщины может быть разрезана на кольца.
Anzoriy> У меня на баконе валяются хорошие дюралевые трубы 51/1,5мм.
Это заманчиво в смысле веса, но эти уникальные трубы находятся только у тебя на балконе (упрощаю), а мебельные - это широкораспространенный товар. Хочется поменьше эксклюзива и побольше "товаров из хозмага".
> Ее можно обточить до к примеру 50,5, тогда элипсности по наруже практически вообще не будет.
Равно как и одинаковой толщины стенки. Проточить тонкостенную трубу снаружи, и при этом оставить монотонную толщину стенки по всей ее длине - это даже не искусство, наверное, а простая случайность, причем редчайшая... Нет, не нужно портить эти трубы.
> Какая длина трубы?
Длина двигателя - триста миллиметров.
Anzoriy> Как это "джокер" - просвети.
"Джокер" - это полки-шкафчики, использующие в своей конструкции вертикальные хромированные трубы в качестве стоек. Эти самые трубы в комплекте с соответствующей фурнитурой (декоративными фланцами, цангами, струбцинами и проч.) и называются "джокер". Смотрится красиво.
Non-conformist>> 3. Собственно способ крепления двигателя в кардане. К заказу это не относится, просто мне интересно знать твое конструкторское мнение.
Anzoriy> А как там все располагаться должно? Напиши, может резьбы где нарежем. В любом случае, это надо заранее обсудить. Поставь в кратцах задачу.
Ставлю задачу. Быстро, надежно и ОБРАТИМО закрепить трехсотмиллиметровый отрезок тонкостенной пятидесятимиллиметровой мебельной трубы в кардане. Кардан должен находиться строго по центру отрезка трубы. Крепление должно воспринимать знакопеременные осевые нагрузки (перегрузки активного участка) величиной до 50 кгс, и передавать их на внутреннее кольцо кардана.
Anzoriy> Перед запуском минимум штуки 3 испытать надо.
Конечно. И профиль тяги снять надо, и импульс посчитать, и все остальное, чтобы таймер ССР правильно настроить.
> Кстати, чем обусловлены такие размеры кардана
Как размеры "А-4" были обусловлены габаритами ж/д платформы, так и размеры этого кардана имеют в виду внутренний диаметр канализационной ПВХ-трубы "сотки". От него, родимого, все и пляшется.
Anzoriy> Я как нибудь тебе пару-тройку своих движков пришлю, спалишь или пульнешь выскажишь свое мнение.
Я-то с удовольствием, только вот стОит-ли по почте?
Anzoriy> А с каким надо? Вообще, есть минимум, при котором ширина колеца будет препятствовать вращению, с другой стороны - меньше зазор - меньше люфты.
Нет, люфты, наверное, тут ни при чем до зазоров между кольцами. Люфты останутся только подшипниковые, коль скоро подшипники будут запрессовываться в кольца, а В подшипники - запрессовываться оси (запрессованные в среднее кольцо). Никаких левых люфтов.
А вот насчет препятствия вращению - это есть такое. Тут такие соображения. Если есть возможность, то кольцевые (радиальные) зазоры между кольцами, наверное, имеет смысл уменьшить до технологически оправданного минимума. Но с другой стороны, их надо оставить достаточными для поворота колец друг относительно друга на угол не менее семнадцати-двадцати градусов. Полный оборот колец совершенно не нужен и даже мешает при наладке. Я думаю, что чуть больше двух миллиметров для этих зазоров будет "самое то". Завтра уточню по чертежу. А ты уточни у своих специалистов, с какими минимальными зазорами дюралевая плита двадцатимиллиметровой толщины может быть разрезана на кольца.
Anzoriy> У меня на баконе валяются хорошие дюралевые трубы 51/1,5мм.
Это заманчиво в смысле веса, но эти уникальные трубы находятся только у тебя на балконе (упрощаю), а мебельные - это широкораспространенный товар. Хочется поменьше эксклюзива и побольше "товаров из хозмага".
> Ее можно обточить до к примеру 50,5, тогда элипсности по наруже практически вообще не будет.
Равно как и одинаковой толщины стенки. Проточить тонкостенную трубу снаружи, и при этом оставить монотонную толщину стенки по всей ее длине - это даже не искусство, наверное, а простая случайность, причем редчайшая... Нет, не нужно портить эти трубы.
> Какая длина трубы?
Длина двигателя - триста миллиметров.
Anzoriy> Как это "джокер" - просвети.
"Джокер" - это полки-шкафчики, использующие в своей конструкции вертикальные хромированные трубы в качестве стоек. Эти самые трубы в комплекте с соответствующей фурнитурой (декоративными фланцами, цангами, струбцинами и проч.) и называются "джокер". Смотрится красиво.
Non-conformist>> 3. Собственно способ крепления двигателя в кардане. К заказу это не относится, просто мне интересно знать твое конструкторское мнение.
Anzoriy> А как там все располагаться должно? Напиши, может резьбы где нарежем. В любом случае, это надо заранее обсудить. Поставь в кратцах задачу.
Ставлю задачу. Быстро, надежно и ОБРАТИМО закрепить трехсотмиллиметровый отрезок тонкостенной пятидесятимиллиметровой мебельной трубы в кардане. Кардан должен находиться строго по центру отрезка трубы. Крепление должно воспринимать знакопеременные осевые нагрузки (перегрузки активного участка) величиной до 50 кгс, и передавать их на внутреннее кольцо кардана.
Anzoriy> Перед запуском минимум штуки 3 испытать надо.
Конечно. И профиль тяги снять надо, и импульс посчитать, и все остальное, чтобы таймер ССР правильно настроить.
> Кстати, чем обусловлены такие размеры кардана
Как размеры "А-4" были обусловлены габаритами ж/д платформы, так и размеры этого кардана имеют в виду внутренний диаметр канализационной ПВХ-трубы "сотки". От него, родимого, все и пляшется.
Anzoriy> Я как нибудь тебе пару-тройку своих движков пришлю, спалишь или пульнешь выскажишь свое мнение.
Я-то с удовольствием, только вот стОит-ли по почте?
> Полный оборот колец совершенно не нужен и даже мешает при наладке.
Однако он может ОЧЕНЬ потребоваться при СБОРКЕ кардана. Нельзя упускать из вида это обстоятельство. Anzoriy, уточни у своих, как будет СОБИРАТЬСЯ кардан!
Однако он может ОЧЕНЬ потребоваться при СБОРКЕ кардана. Нельзя упускать из вида это обстоятельство. Anzoriy, уточни у своих, как будет СОБИРАТЬСЯ кардан!
Non-conformist> А ты уточни у своих специалистов, с какими минимальными зазорами дюралевая плита двадцатимиллиметровой толщины может быть разрезана на кольца.
Хорошо.
Anzoriy>> Хочется поменьше эксклюзива и побольше "товаров из хозмага".
Я понял, но как центрировать - непонятно.
Non-conformist> Я-то с удовольствием, только вот стОит-ли по почте?
"Автолюксом" и всего делов.
Хорошо.
Anzoriy>> Хочется поменьше эксклюзива и побольше "товаров из хозмага".
Я понял, но как центрировать - непонятно.
Non-conformist> Я-то с удовольствием, только вот стОит-ли по почте?
"Автолюксом" и всего делов.
Non-conformist> Длина двигателя - триста миллиметров.
Как ты решил?
В принципе цифра вроде приемлемая, учитывая сахар с катализатором.
Non-conformist> таймер ССР правильно настроить
Таймер мне здесь кажется совсем неподходящим. Полёт с твоей траекторией непонятно как расчитывать. И даже если расчитать, нет гарантии, что ракета полетит по плавной кривой, а не зигзагами, а от этого высота будет сильно зависеть.
Лучше что-нибудь из датчиков апогея. Точнее, в дополнение к таймеру.
Как ты решил?
В принципе цифра вроде приемлемая, учитывая сахар с катализатором.
Non-conformist> таймер ССР правильно настроить
Таймер мне здесь кажется совсем неподходящим. Полёт с твоей траекторией непонятно как расчитывать. И даже если расчитать, нет гарантии, что ракета полетит по плавной кривой, а не зигзагами, а от этого высота будет сильно зависеть.
Лучше что-нибудь из датчиков апогея. Точнее, в дополнение к таймеру.

Anzoriy> Я понял, но как центрировать - непонятно.
И я не понял, о какой центровке ты говоришь. Мебельная труба достаточно ровная, эллипсность максимум две-три десятки (для нашего случая это мелочь). Т.е. если она будет чуть болтаться по эллиптическим зазорам во внутреннем кольце кардана, то в этом нет ничего страшного, поскольку мотор все равно будет жестко крепиться к этому кольцу, скорее всего винтами.
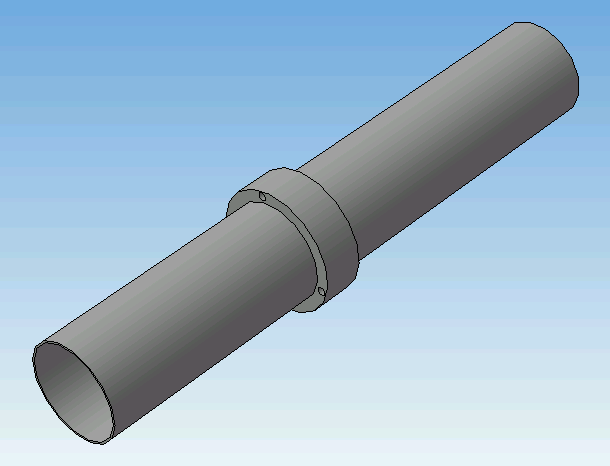
МНЕ крепление пока видится как еще одно кольцо-фланец, формой и размерами повторяющее внутреннее кольцо кардана. На внутренней поверхности фланца имеется ряд неглубоких кольцевых проточек; внешняя поверхность трубы в месте посадки фланца (это место смещено вдоль по образующей на высоту внутреннего кольца кардана) также зашершавлена; эпоксидка. Картинка ниже. Если есть технологический запас по уменьшению кольцевых зазоров (о чем мы говорили чуть выше), то по-моему в первую очередь за счет одного из этих зазоров напрашивается чуть увеличить толщину именно ВНУТРЕННЕГО кольца.
Anzoriy> "Автолюксом" и всего делов.
Я пользуюсь "Ночным Экспрессом"; насчет черниговского "Автолюкса" я пока не в курсе. Когда все устаканится и более-менее перейдет в практическую плоскость, "Ночным Экспрессом" я планирую отослать тебе комплект подшипников. Удобна ли тебе эта контора? Если нет, то буду искать "Автолюкс".
И я не понял, о какой центровке ты говоришь. Мебельная труба достаточно ровная, эллипсность максимум две-три десятки (для нашего случая это мелочь). Т.е. если она будет чуть болтаться по эллиптическим зазорам во внутреннем кольце кардана, то в этом нет ничего страшного, поскольку мотор все равно будет жестко крепиться к этому кольцу, скорее всего винтами.
МНЕ крепление пока видится как еще одно кольцо-фланец, формой и размерами повторяющее внутреннее кольцо кардана. На внутренней поверхности фланца имеется ряд неглубоких кольцевых проточек; внешняя поверхность трубы в месте посадки фланца (это место смещено вдоль по образующей на высоту внутреннего кольца кардана) также зашершавлена; эпоксидка. Картинка ниже. Если есть технологический запас по уменьшению кольцевых зазоров (о чем мы говорили чуть выше), то по-моему в первую очередь за счет одного из этих зазоров напрашивается чуть увеличить толщину именно ВНУТРЕННЕГО кольца.
Anzoriy> "Автолюксом" и всего делов.
Я пользуюсь "Ночным Экспрессом"; насчет черниговского "Автолюкса" я пока не в курсе. Когда все устаканится и более-менее перейдет в практическую плоскость, "Ночным Экспрессом" я планирую отослать тебе комплект подшипников. Удобна ли тебе эта контора? Если нет, то буду искать "Автолюкс".
Прикреплённые файлы:
Non-conformist>> Длина двигателя - триста миллиметров.
Serge77> Как ты решил?
Психологический барьер. С этой круглой длиной и круглыми пятьюдесятью миллиметрами диаметра размах отклонения получается чуть больше круглых же двадцати градусов (± 10).
Serge77> В принципе цифра вроде приемлемая, учитывая сахар с катализатором.
Да более чем, я думаю. Спиннер в смысле пропорций ВООБЩЕ смотрит в сторону откровенного "бочонка". И тем не менее рвет с места просто душевно. Опять-таки, объективными данными я не владею. Впрочем, есть видео с масштабным предметом (крыша автомобиля). Я даже считал ускорение по этому ролику, но цифер уже не помню.
Non-conformist>> таймер ССР правильно настроить
Serge77> Таймер мне здесь кажется совсем неподходящим. Лучше что-нибудь из датчиков апогея. Точнее, в дополнение к таймеру.
Именно, что в дополнение: траектория сильно пологая. В Крым ведь не поедем? Или пригласишь? Как бы двойной парашют не потребовался. В смысле моделирования параметров траектории я вообще сильно надеюсь на Роксим (или как бишь его)... Насчет колебаний - давай все-таки примем, что их не будет. А то вообще непонятно, от чего отталкиваться.
Serge77> Как ты решил?
Психологический барьер. С этой круглой длиной и круглыми пятьюдесятью миллиметрами диаметра размах отклонения получается чуть больше круглых же двадцати градусов (± 10).
Serge77> В принципе цифра вроде приемлемая, учитывая сахар с катализатором.
Да более чем, я думаю. Спиннер в смысле пропорций ВООБЩЕ смотрит в сторону откровенного "бочонка". И тем не менее рвет с места просто душевно. Опять-таки, объективными данными я не владею. Впрочем, есть видео с масштабным предметом (крыша автомобиля). Я даже считал ускорение по этому ролику, но цифер уже не помню.
Non-conformist>> таймер ССР правильно настроить
Serge77> Таймер мне здесь кажется совсем неподходящим. Лучше что-нибудь из датчиков апогея. Точнее, в дополнение к таймеру.
Именно, что в дополнение: траектория сильно пологая. В Крым ведь не поедем? Или пригласишь? Как бы двойной парашют не потребовался. В смысле моделирования параметров траектории я вообще сильно надеюсь на Роксим (или как бишь его)... Насчет колебаний - давай все-таки примем, что их не будет. А то вообще непонятно, от чего отталкиваться.
Non-conformist> Спиннер в смысле пропорций ВООБЩЕ смотрит в сторону откровенного "бочонка". И тем не менее рвет с места просто душевно.
В начале горения тяга будет без вопросов, ведь соотношение длина/диаметр в этот момент большое. Весь вопрос в том, сохранится ли тяга до конца горения, а здесь уже играет соотношение длина/диаметр конечное, а оно равно 6. Но для сахара наверно нормально.
Non-conformist> В смысле моделирования параметров траектории я вообще сильно надеюсь на Роксим
Он считает траектории с наклонной направляющей, будем считать, что это более-менее подходит.
В начале горения тяга будет без вопросов, ведь соотношение длина/диаметр в этот момент большое. Весь вопрос в том, сохранится ли тяга до конца горения, а здесь уже играет соотношение длина/диаметр конечное, а оно равно 6. Но для сахара наверно нормально.
Non-conformist> В смысле моделирования параметров траектории я вообще сильно надеюсь на Роксим
Он считает траектории с наклонной направляющей, будем считать, что это более-менее подходит.
Xan> 1. Двухосевой датчик с четырьмя сенсорами - отстой. При отклонении от нуля по одной оси, чувствительность по другой резко падает.
И тем не менее фирма Futaba имеет на этот счет свое мнение:

***
Хай вiдпочивае твiй могутнiй дух поруч з нами, о Найкращий з усiх термостатiв!
И тем не менее фирма Futaba имеет на этот счет свое мнение:
Кобра - продолжение
Ckona>> Есть экспериментальная цифра: от сопла Ф9/L6 мм при давлении 8 атм тяга ~7 кГс, расход ~2,5 литра/с.Non-conformist> Это очень хорошая цифра. Семь килограмм - это очень хорошо. Вселяет надежду. Надо только понимать что это давление перед соплом, а не где-то в далеке от него. ========= Датчик световой помогает стабилизировать самолет - 4 фотосенсора руководство- настройка фонариком. Futaba PA-2 Pilot Assist Link - Stacks the odds against a crash!// http://www.futabarc.com инфо инструменты Ckona>>> Есть экспериментальная цифра: от сопла Ф9/L6 мм при давлении 8 атм тяга ~7 кГс, расход ~2,5 литра/с.Non-conformist>> Это очень хорошая цифра. // Дальше — www.balancer.ru***
Хай вiдпочивае твiй могутнiй дух поруч з нами, о Найкращий з усiх термостатiв!
Xan, а не имеешь ли ты отношения к НПП "Эталон", г. Алматы? Надеюсь, ничего личного я этим вопросом не затронул... Просто наши деятели недавно купили у этой конторы новую калориметрическую бомбу. Ассоциативный ряд прост - "датчики освещенности - фотометры - калориметры".
Если есть технологический запас по уменьшению кольцевых зазоров
Сегодня с мужиками обсуждали, к сожалению, минимальный зазор, если назезать "матрешкой" - 4,5мм. Посмотрю, что у меня есть по материалу.
Non-conformist> Я пользуюсь "Ночным Экспрессом"
"Автолюкс" в Чернигове есть, но мне и экспресс поискать не сложно.
Сегодня с мужиками обсуждали, к сожалению, минимальный зазор, если назезать "матрешкой" - 4,5мм. Посмотрю, что у меня есть по материалу.
Non-conformist> Я пользуюсь "Ночным Экспрессом"
"Автолюкс" в Чернигове есть, но мне и экспресс поискать не сложно.
Non-conformist> 1. А что же тогда "логарифмическая АРУ"? Не справится с такими колебаниями чувствительности?
Времени жизни не хватает.
Попробую в будущем, через несколько дней.
Non-conformist> 1.1.1 В "Гелиостате" была испытана конструкция с полупрозрачным светорассеивающим экраном (тонкая бумага), опертым о светоделительную крестовину. Какие будут твои комментарии по ЭТОЙ конфигурации датчика? inverted_pendulum
Там, когда зайчик окажется полностью в одном из квадрантов, чувствительность станет нулевой. То есть, датчик "ляжет на упор". Чтоб система управления в этом случае смогла вывести маятник снова в равновесие, она должна быть шибко вумной. Я бы такую делать не взялся.
Пока зайчик попадает во все четыре квадранта разом, кривая чувствительности вполне приличная - в середине у неё довольно прямой участок.
На мой взгляд, лучше выбросить вообще линзу. Тогда зайчик станет шире. Наверное, примерно оптимально расширить его до половины диаметра полупрозрачного экрана.
Non-conformist> А как ты относишься к идее не гнаться за линейностью, а КОМПЕНСИРОВАТЬ ее за счет идентичности кривых двух сенсоров (направления и положения)
Если между ними будет ПИД, то линейность нужна. Хотя бы процентов 30.
Достигается это достаточно легко, проблемы не вижу.
Non-conformist> одинаковой конфигурации (проинвертировав одну из этих кривых каскадом на единственном транзисторе, включенном по схеме ОЭ)?
Это ты что-то странное говоришь. Про "проинвертировать". Или я не понял.
Если без всяких ПИДов, просто пропорциональное управление, то там действительно, можно при нелинейных датчиках получить линейность смещение_источник <--> смещение_актуатора.
Но задача другая.
Non-conformist> Я вообще сейчас возлагаю надежды именно на пирамидальный датчик направления о четырех сенсорах (по паре на ось), с "логарифмической АРУ". Честно говоря, твое заявление об отстойности этой конфигурации меня несколько озадачило.
Если зайчик точечный или круглый, то чувствительность по одной оси зависит от отклонения по другой оси. Это усложнит настройку ПИД.
Или надо работать в более узкой области.
Или делать по каждой оси отдельный датчик и щелевую диафрагму.
Времени жизни не хватает.
Попробую в будущем, через несколько дней.
Non-conformist> 1.1.1 В "Гелиостате" была испытана конструкция с полупрозрачным светорассеивающим экраном (тонкая бумага), опертым о светоделительную крестовину. Какие будут твои комментарии по ЭТОЙ конфигурации датчика? inverted_pendulum
Там, когда зайчик окажется полностью в одном из квадрантов, чувствительность станет нулевой. То есть, датчик "ляжет на упор". Чтоб система управления в этом случае смогла вывести маятник снова в равновесие, она должна быть шибко вумной. Я бы такую делать не взялся.
Пока зайчик попадает во все четыре квадранта разом, кривая чувствительности вполне приличная - в середине у неё довольно прямой участок.
На мой взгляд, лучше выбросить вообще линзу. Тогда зайчик станет шире. Наверное, примерно оптимально расширить его до половины диаметра полупрозрачного экрана.
Non-conformist> А как ты относишься к идее не гнаться за линейностью, а КОМПЕНСИРОВАТЬ ее за счет идентичности кривых двух сенсоров (направления и положения)
Если между ними будет ПИД, то линейность нужна. Хотя бы процентов 30.
Достигается это достаточно легко, проблемы не вижу.
Non-conformist> одинаковой конфигурации (проинвертировав одну из этих кривых каскадом на единственном транзисторе, включенном по схеме ОЭ)?
Это ты что-то странное говоришь. Про "проинвертировать". Или я не понял.
Если без всяких ПИДов, просто пропорциональное управление, то там действительно, можно при нелинейных датчиках получить линейность смещение_источник <--> смещение_актуатора.
Но задача другая.
Non-conformist> Я вообще сейчас возлагаю надежды именно на пирамидальный датчик направления о четырех сенсорах (по паре на ось), с "логарифмической АРУ". Честно говоря, твое заявление об отстойности этой конфигурации меня несколько озадачило.
Если зайчик точечный или круглый, то чувствительность по одной оси зависит от отклонения по другой оси. Это усложнит настройку ПИД.
Или надо работать в более узкой области.
Или делать по каждой оси отдельный датчик и щелевую диафрагму.
Non-conformist> Xan, а не имеешь ли ты отношения к НПП "Эталон", г. Алматы?
Не, датчик я делал для пылемера для электростанции (измерение выбросов золы в атмосферу, экология).
В результате всё было сделано совсем иначе.
Xan>> 1. Двухосевой датчик с четырьмя сенсорами - отстой. При отклонении от нуля по одной оси, чувствительность по другой резко падает.
Non-conformist> И тем не менее фирма Futaba имеет на этот счет свое мнение:
Не, там совершенно другой датчик.
Я имел ввиду достаточно узкотелесный, градусов до ±30.
Не, датчик я делал для пылемера для электростанции (измерение выбросов золы в атмосферу, экология).
В результате всё было сделано совсем иначе.
Xan>> 1. Двухосевой датчик с четырьмя сенсорами - отстой. При отклонении от нуля по одной оси, чувствительность по другой резко падает.
Non-conformist> И тем не менее фирма Futaba имеет на этот счет свое мнение:
Не, там совершенно другой датчик.
Я имел ввиду достаточно узкотелесный, градусов до ±30.
Xan> зайчик станет шире. Наверное, примерно оптимально расширить его до половины диаметра полупрозрачного экрана.
О, и я то же самое писал ;^))
О, и я то же самое писал ;^))
Anzoriy> к сожалению, минимальный зазор, если назезать "матрешкой" - 4,5мм.
Насколько я понимаю, наиболее критичный элемент кардана - среднее кольцо. Больщое кольцо оперто о трубу, малое - о фланец крепления двигателя, плюс к тому оно малое, а стало быть, более жесткое. А вот среднее кольцо вроде как больше всех механически нагружено. При расчете деталей, насколько я помню, в прочностных формулах важную роль играет площадь поперечного сечения. В кардане, который выточил Алексей, площадь поперечного сечения среднего кольца 100 мм.кв. Если в новом кардане, по тому чертежу, что я тебе дал, с обеих сторон увеличить зазоры с 3,5 до 4,5 мм, то толщина кольца получится 7 мм, что при высоте 20 мм даст площадь поперечного сечения 140 мм.кв. Алексеев кардан спокойно держит 45 кгс. Значит, примерно эту же нагрузку будет держать и твой кардан, причем как минимум с полуторным запасом. Такие вот соображения...
> Посмотрю, что у меня есть по материалу.
Материал есть - тридцатимиллиметровая дюралевая плита. Он сейчас у Алексея (Ckona), в Киеве. Если ты найдешь подходящий кусок дюралевой плиты толщиной 20 мм - будет здорово. А то вроде как жалко 10 мм толщины плиты в стружку переводить.
Non-conformist>> Я пользуюсь "Ночным Экспрессом"
Anzoriy> "Автолюкс" в Чернигове есть, но мне и экспресс поискать не сложно.
А мне не сложно поискать Автолюкс. Найди у себя "НЭ" и сравни, что тебе удобнее и/или дешевле.
Насколько я понимаю, наиболее критичный элемент кардана - среднее кольцо. Больщое кольцо оперто о трубу, малое - о фланец крепления двигателя, плюс к тому оно малое, а стало быть, более жесткое. А вот среднее кольцо вроде как больше всех механически нагружено. При расчете деталей, насколько я помню, в прочностных формулах важную роль играет площадь поперечного сечения. В кардане, который выточил Алексей, площадь поперечного сечения среднего кольца 100 мм.кв. Если в новом кардане, по тому чертежу, что я тебе дал, с обеих сторон увеличить зазоры с 3,5 до 4,5 мм, то толщина кольца получится 7 мм, что при высоте 20 мм даст площадь поперечного сечения 140 мм.кв. Алексеев кардан спокойно держит 45 кгс. Значит, примерно эту же нагрузку будет держать и твой кардан, причем как минимум с полуторным запасом. Такие вот соображения...
> Посмотрю, что у меня есть по материалу.
Материал есть - тридцатимиллиметровая дюралевая плита. Он сейчас у Алексея (Ckona), в Киеве. Если ты найдешь подходящий кусок дюралевой плиты толщиной 20 мм - будет здорово. А то вроде как жалко 10 мм толщины плиты в стружку переводить.
Non-conformist>> Я пользуюсь "Ночным Экспрессом"
Anzoriy> "Автолюкс" в Чернигове есть, но мне и экспресс поискать не сложно.
А мне не сложно поискать Автолюкс. Найди у себя "НЭ" и сравни, что тебе удобнее и/или дешевле.
Xan> Времени жизни не хватает. Попробую в будущем, через несколько дней.
Неужели макетировать собираешься?
Xan> На мой взгляд, лучше выбросить вообще линзу. Тогда зайчик станет шире. Наверное, примерно оптимально расширить его до половины диаметра полупрозрачного экрана.
Согласен.
Xan> Если между ними будет ПИД, то линейность нужна. Хотя бы процентов 30.
Крамольный вопрос. А нужен ли вообще ПИД на 1,8 сек времени работы? Что подсказывает тебе твой внутренний голос? "Гелиостат" - чисто пропорциональное управление - ерзал ОДИННАДЦАТЬ секунд, причем имхо в ГОРАЗДО более тяжелых условиях, чем резко разгоняющаяся ракета, да еще со стабилизаторами. Плюс здесь будет ШИМ-модулятор с настраиваемой дед-зоной.
Xan> Достигается это достаточно легко, проблемы не вижу.
Про колодезь понятно. А белая отражательная полоска (датчик положения) тоже обеспечит линейность?
Non-conformist>> проинвертировав одну из этих кривых каскадом на единственном транзисторе, включенном по схеме ОЭ
Xan> Это ты что-то странное говоришь.
Ну как... Имеем, к примеру, некий источник сигнала с АЧХ вида "(". Для того, чтобы получить АЧХ вида "/" подключаем к нему усилитель с АЧХ вида ")". Амплитудно-частотная характеристика УСИЛИТЕЛЯ представляет собой зеркальное отображение (инверсию) амплитудно-частотной характеристики ИСТОЧНИКА. Классика жанра, разве нет?
Xan> Если без всяких ПИДов, просто пропорциональное управление, то там действительно, можно при нелинейных датчиках получить линейность смещение_источник смещение_актуатора.
Ну... Разве плохо?
Xan> Но задача другая.
Более-менее правильно порулить движком в течение максимум двух секунд. Причем самый ответственный момент - первые примерно полсекунды, когда скорость еще недостаточна для аэродинамической стабилизации. А остальные полторы секунды имхо уже вовсю будет работать аэродинамика... Что скажешь?
Неужели макетировать собираешься?
Xan> На мой взгляд, лучше выбросить вообще линзу. Тогда зайчик станет шире. Наверное, примерно оптимально расширить его до половины диаметра полупрозрачного экрана.
Согласен.
Xan> Если между ними будет ПИД, то линейность нужна. Хотя бы процентов 30.
Крамольный вопрос. А нужен ли вообще ПИД на 1,8 сек времени работы? Что подсказывает тебе твой внутренний голос? "Гелиостат" - чисто пропорциональное управление - ерзал ОДИННАДЦАТЬ секунд, причем имхо в ГОРАЗДО более тяжелых условиях, чем резко разгоняющаяся ракета, да еще со стабилизаторами. Плюс здесь будет ШИМ-модулятор с настраиваемой дед-зоной.
Xan> Достигается это достаточно легко, проблемы не вижу.
Про колодезь понятно. А белая отражательная полоска (датчик положения) тоже обеспечит линейность?
Non-conformist>> проинвертировав одну из этих кривых каскадом на единственном транзисторе, включенном по схеме ОЭ
Xan> Это ты что-то странное говоришь.
Ну как... Имеем, к примеру, некий источник сигнала с АЧХ вида "(". Для того, чтобы получить АЧХ вида "/" подключаем к нему усилитель с АЧХ вида ")". Амплитудно-частотная характеристика УСИЛИТЕЛЯ представляет собой зеркальное отображение (инверсию) амплитудно-частотной характеристики ИСТОЧНИКА. Классика жанра, разве нет?
Xan> Если без всяких ПИДов, просто пропорциональное управление, то там действительно, можно при нелинейных датчиках получить линейность смещение_источник смещение_актуатора.
Ну... Разве плохо?
Xan> Но задача другая.
Более-менее правильно порулить движком в течение максимум двух секунд. Причем самый ответственный момент - первые примерно полсекунды, когда скорость еще недостаточна для аэродинамической стабилизации. А остальные полторы секунды имхо уже вовсю будет работать аэродинамика... Что скажешь?

Non-conformist> Насколько я понимаю,
Может и фланец на двигателе, и ответную часть кольца кардана сделать коническими? То есть, самоцентрирующимися. Поверхность контакта увеличится, а зажимное устройство может быть реализовано на резьбовом соединении через прокладку. Если, конечно есть место для этого. Только нужно предусмотреть упор на кольце, чтобы не заклинило. Что-то на под вид (фото).
И вот такая идея: а почему бы не разделить задачу на два этапа? Первый этап - Кобра_0.5. Цель:" Создание управляемого в рамках заданного алгоритма по pitch & yaw (sorry, забыл по-русски) экспериментального устройства на РДТТ". В этой части проекта нужно будет реализовать движение устройства (ракеты) по баллистической (это важно) траектории с малоугольным изменением траектории, используя запрограммируемый алгоритм управления. То есть программа будет отклонять двигатель на угол ± сначала в одной плоскости, а затем в другой. Ракета в результате должна будет сделать змейку по двум векторам. Когда ты убедишься в работоспособности системы управления + механики+аэродинамики, тогда можно будет перейти к реализации второго этапа: управления устройством по отклику от изменяющейся динамически физической величины (светового потока). Это позволит уменьшить число неизвестных в проекте.
Может и фланец на двигателе, и ответную часть кольца кардана сделать коническими? То есть, самоцентрирующимися. Поверхность контакта увеличится, а зажимное устройство может быть реализовано на резьбовом соединении через прокладку. Если, конечно есть место для этого. Только нужно предусмотреть упор на кольце, чтобы не заклинило. Что-то на под вид (фото).
И вот такая идея: а почему бы не разделить задачу на два этапа? Первый этап - Кобра_0.5. Цель:" Создание управляемого в рамках заданного алгоритма по pitch & yaw (sorry, забыл по-русски) экспериментального устройства на РДТТ". В этой части проекта нужно будет реализовать движение устройства (ракеты) по баллистической (это важно) траектории с малоугольным изменением траектории, используя запрограммируемый алгоритм управления. То есть программа будет отклонять двигатель на угол ± сначала в одной плоскости, а затем в другой. Ракета в результате должна будет сделать змейку по двум векторам. Когда ты убедишься в работоспособности системы управления + механики+аэродинамики, тогда можно будет перейти к реализации второго этапа: управления устройством по отклику от изменяющейся динамически физической величины (светового потока). Это позволит уменьшить число неизвестных в проекте.
Прикреплённые файлы:
Xan> Там, когда зайчик окажется полностью в одном из квадрантов, чувствительность станет нулевой. То есть, датчик "ляжет на упор". Чтоб система управления в этом случае смогла вывести маятник снова в равновесие, она должна быть шибко вумной.
В "Гелиостате" работал примитивный ШИМ-модулятор на 561 серии. Я экспериментировал с разными диаметрами светового пятна - конструкция датчика делать это позволяла оперативно, на ходу. Самое маленькое пятно имело вид яркой точки диаметром менее миллиметра. Под конец я вообще снял линзу с держателем и отодрал светорассеивающий экран от крестовины. Разница в поведении регулятора получилась "на грани нюанса", хотя она и была отмечена. Я в том смысле, что на ПРОДОЛЖИТЕЛЬНОСТЬ балансировки все эти манипуляции практически никакого влияния не оказали.
По поводу снижения чувствительности одной из двух взаимно перпендикулярных пар сенсоров при отклонении датчика строго вдоль одной из осей. Если датчик отклонился СТРОГО вдоль одной оси, то второй оси чувствительность вроде как ВООБЩЕ ни к чему - ведь по этой оси датчик остается сбалансированным, не правда ли? В промежуточных же случаях превалирует сигнал той оси (пары), разбаланс по которой больше - с большей скоростью стабилизируется более разбалансированная пара, а с меньшей скоростью - менее разбалансированная. Эти два процесса наложены друг на друга во времени, и протекают параллельно. В результате чего пятно загоняется в центр датчика практически синхронно по двум осям: больше разбаланс - больше скорость перемещения пятна, меньше разбаланс - меньше скорость. Причем нелинейность сенсоров на синхронность регулировки по осям никак не влияет - все четыре сенсора одинаковы. Так что все очень четко получается и по логике, и на практике.
В "Гелиостате" работал примитивный ШИМ-модулятор на 561 серии. Я экспериментировал с разными диаметрами светового пятна - конструкция датчика делать это позволяла оперативно, на ходу. Самое маленькое пятно имело вид яркой точки диаметром менее миллиметра. Под конец я вообще снял линзу с держателем и отодрал светорассеивающий экран от крестовины. Разница в поведении регулятора получилась "на грани нюанса", хотя она и была отмечена. Я в том смысле, что на ПРОДОЛЖИТЕЛЬНОСТЬ балансировки все эти манипуляции практически никакого влияния не оказали.
По поводу снижения чувствительности одной из двух взаимно перпендикулярных пар сенсоров при отклонении датчика строго вдоль одной из осей. Если датчик отклонился СТРОГО вдоль одной оси, то второй оси чувствительность вроде как ВООБЩЕ ни к чему - ведь по этой оси датчик остается сбалансированным, не правда ли? В промежуточных же случаях превалирует сигнал той оси (пары), разбаланс по которой больше - с большей скоростью стабилизируется более разбалансированная пара, а с меньшей скоростью - менее разбалансированная. Эти два процесса наложены друг на друга во времени, и протекают параллельно. В результате чего пятно загоняется в центр датчика практически синхронно по двум осям: больше разбаланс - больше скорость перемещения пятна, меньше разбаланс - меньше скорость. Причем нелинейность сенсоров на синхронность регулировки по осям никак не влияет - все четыре сенсора одинаковы. Так что все очень четко получается и по логике, и на практике.
Non-conformist>> Насколько я понимаю,
a_centaurus> Может и фланец на двигателе, и ответную часть кольца кардана сделать коническими?
Можно и так. Станет намного удобнее собирать ракету на старте. На двигателе - тонкая втулка с мелкой наружной резьбой, на внутреннем кольце кардана - ответная внутренняя резьба. Вставил и закрутил до упора. Пускай Анзорий посмотрит - если возражений с его стороны не последует, то оформлю документально.
> И вот такая идея ... Первый этап - используя запрограммируемый алгоритм управления.
У меня мечта выйти на ПОЛНЕЙШИЙ примитив. Чтобы без МК и программ... Если, конечно, получится. Основное соображение - спортивный интерес. Объективная трудность, подталкивающая в этом направлении - отсутствие здесь заинтересованных лиц, готовых ПРАКТИЧЕСКИ взвалить на себя "цифровую нагрузку" в интересах этого проекта. И боюсь, что таковые не появятся и в дальнейшем. Слишком разные люди, слишком разные интересы - несмотря на их тематическую близость. Между мной и участником RockI, к примеру - такая же пропасть в этом смысле, как между мной же и моей супругой. Т.е. ей-то вроде и прикольно НАБЛЮДАТЬ некое действо на природе, но отнюдь не ЗАНИМАТЬСЯ этим ПРАКТИЧЕСКИ.
И если как будто пока получилось сфокусировать интересы уже ЧЕТЫРЕХ участников практически В ОДНОЙ ТОЧКЕ, то чтобы на эту фокусировку еще наложилось и нормальное знание МК-тематики хотя бы одним из этих четырех... Это имхо примерно то же самое, что открыть кодовый замок хаотическим вращением колесиков. Хотя... Время покажет, я думаю.
a_centaurus> Может и фланец на двигателе, и ответную часть кольца кардана сделать коническими?
Можно и так. Станет намного удобнее собирать ракету на старте. На двигателе - тонкая втулка с мелкой наружной резьбой, на внутреннем кольце кардана - ответная внутренняя резьба. Вставил и закрутил до упора. Пускай Анзорий посмотрит - если возражений с его стороны не последует, то оформлю документально.
> И вот такая идея ... Первый этап - используя запрограммируемый алгоритм управления.
У меня мечта выйти на ПОЛНЕЙШИЙ примитив. Чтобы без МК и программ... Если, конечно, получится. Основное соображение - спортивный интерес. Объективная трудность, подталкивающая в этом направлении - отсутствие здесь заинтересованных лиц, готовых ПРАКТИЧЕСКИ взвалить на себя "цифровую нагрузку" в интересах этого проекта. И боюсь, что таковые не появятся и в дальнейшем. Слишком разные люди, слишком разные интересы - несмотря на их тематическую близость. Между мной и участником RockI, к примеру - такая же пропасть в этом смысле, как между мной же и моей супругой. Т.е. ей-то вроде и прикольно НАБЛЮДАТЬ некое действо на природе, но отнюдь не ЗАНИМАТЬСЯ этим ПРАКТИЧЕСКИ.
И если как будто пока получилось сфокусировать интересы уже ЧЕТЫРЕХ участников практически В ОДНОЙ ТОЧКЕ, то чтобы на эту фокусировку еще наложилось и нормальное знание МК-тематики хотя бы одним из этих четырех... Это имхо примерно то же самое, что открыть кодовый замок хаотическим вращением колесиков. Хотя... Время покажет, я думаю.
Non-conformist> На двигателе - тонкая втулка с мелкой наружной резьбой, на внутреннем кольце кардана - ответная внутренняя резьба.
Чтобы вписаться резьбой в толщину внутреннего кольца, куда практически ЗАПОДЛИЦО, ПО ВСЕЙ ТОЛЩИНЕ впрессованы два подшипника, можно как раз использовать те "лишние" десять миллиметров толщины тридцатимиллиметровой плиты - вынести крепежную резьбу по оси кольца в сторону кормы. Пяти миллиметров длины мелкой резьбы имхо будет более чем достаточно.
Чтобы вписаться резьбой в толщину внутреннего кольца, куда практически ЗАПОДЛИЦО, ПО ВСЕЙ ТОЛЩИНЕ впрессованы два подшипника, можно как раз использовать те "лишние" десять миллиметров толщины тридцатимиллиметровой плиты - вынести крепежную резьбу по оси кольца в сторону кормы. Пяти миллиметров длины мелкой резьбы имхо будет более чем достаточно.
Реклама Google — средство выживания форумов :)
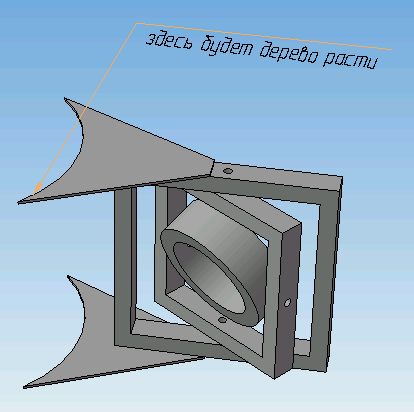
Фантазии на тему "Кобра 1/2", которую предложил Сентаурус. Кронштейн для комплексных ОТИ, основная идея.
Прикреплённые файлы:
Copyright © Balancer 1997..2023
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
