-
![[image]](https://www.balancer.ru/cache/sites/w/w/www.afterwork.com.ua/wp-content/uploads/2011/03/128x128-crop/launcher_a2.jpg)
Обыкновенные водяные ракеты из пластиковых бутылок
Теги:
 Атмосфера
Атмосфера

Брат-2> ...По внешнему краю маховика насверлил отверстий, которые будут играть роль лопаток. По касательной к отверстиям через сопло подведен воздух...
Компрессор не летит, его расходами можно и пренебречь - ну подумаешь, несколько дольше будешь разгонять ротор. А вот когда подвод энергии к ротору закончится, вот эти все твои отверстия-лопатки начнут выедать запасённую энергию. "Насосные потери" называется.
Компрессор не летит, его расходами можно и пренебречь - ну подумаешь, несколько дольше будешь разгонять ротор. А вот когда подвод энергии к ротору закончится, вот эти все твои отверстия-лопатки начнут выедать запасённую энергию. "Насосные потери" называется.


 инфо
инфо инструменты
инструменты Ckona
Ckona

Брат-2> По касательной к отверстиям через сопло подведен воздух от компрессора.
Брат-2! почему электромоторчик с маховиком не может быть гироскопом ?
Брат-2! почему электромоторчик с маховиком не может быть гироскопом ?

 Брат-2
Брат-2

Ckona> Светодиод, моргающий от трансформатора или звукового генератора, ....
Во-первых, измерить частоту вращения маховика у меня нет проблемы, но пока есть организационные проблемы. В маховике есть одна дырочка, можно создать открытую оптопару, есть и частомер Ч3-63. Но компрессор в гараже, а там сейчас нет сети 220в. Самое главное невестка вышла на работу, внучке 2,5 года, бабушка ушла раньше на 3 года на пенсию, решили, что так будет всем лучше, но вот свободного времени у меня не стало. Впрочем, у меня сейчас задача просто проверить саму возможность практической реализации подобной идеи, тонкости отложил на потом, крутится быстро, ну и ладно.
Атмосфера> ... вот эти все твои отверстия-лопатки начнут выедать запасённую энергию. "Насосные потери" называется.
Во-вторых, в маховике организованы псевдо лопатки, они образованы глухими отверстиями. Разрабатывая турбину, я именно и думал об уменьшении насосных потерь и лобового сопротивления, ведь подобная турбина ничего не сосет! Длительность времени фазы активного управления условно принял за 10 сек., считаю, что за указанное время обороты упадут не более чем на 30%, что не критично.
Ckona> ...почему электромоторчик с маховиком не может быть гироскопом ?
В-третьих, я действительно думал об использовании коллекторного, или электромотора от CD для привода маховика. Но, используя внешний источник энергии можно подвести значительную, фактически не ограниченную мощность для раскрутки маховика. Мы должны думать и о весе конструкции, а длительность ее работы не более 10 сек., поэтому рационально использовать именно запасенную инерционную энергию маховика. Но, никогда не говори «никогда»!")
Во-первых, измерить частоту вращения маховика у меня нет проблемы, но пока есть организационные проблемы. В маховике есть одна дырочка, можно создать открытую оптопару, есть и частомер Ч3-63. Но компрессор в гараже, а там сейчас нет сети 220в. Самое главное невестка вышла на работу, внучке 2,5 года, бабушка ушла раньше на 3 года на пенсию, решили, что так будет всем лучше, но вот свободного времени у меня не стало. Впрочем, у меня сейчас задача просто проверить саму возможность практической реализации подобной идеи, тонкости отложил на потом, крутится быстро, ну и ладно.
Атмосфера> ... вот эти все твои отверстия-лопатки начнут выедать запасённую энергию. "Насосные потери" называется.
Во-вторых, в маховике организованы псевдо лопатки, они образованы глухими отверстиями. Разрабатывая турбину, я именно и думал об уменьшении насосных потерь и лобового сопротивления, ведь подобная турбина ничего не сосет! Длительность времени фазы активного управления условно принял за 10 сек., считаю, что за указанное время обороты упадут не более чем на 30%, что не критично.
Ckona> ...почему электромоторчик с маховиком не может быть гироскопом ?
В-третьих, я действительно думал об использовании коллекторного, или электромотора от CD для привода маховика. Но, используя внешний источник энергии можно подвести значительную, фактически не ограниченную мощность для раскрутки маховика. Мы должны думать и о весе конструкции, а длительность ее работы не более 10 сек., поэтому рационально использовать именно запасенную инерционную энергию маховика. Но, никогда не говори «никогда»!

Брат-2> Но, используя внешний источник энергии можно подвести значительную, фактически не ограниченную мощность для раскрутки маховика.
Так и моторчику тоже можно подвести внешний источник.
Так и моторчику тоже можно подвести внешний источник.
Serge77> Так и моторчику тоже можно подвести внешний источник.
Конечно можно, но электрическая тоже превратится в кинетическую, а если никакой разницы? А вот разница есть. Электромотор в любом конструктивном исполнении содержит малоэффективную массу, то есть в центре маховика. Если обесточить электромотор, то он точно начнет отсасывать энергию из маховика. Если электромотор, то питание от автономного источника.
Конечно можно, но электрическая тоже превратится в кинетическую, а если никакой разницы? А вот разница есть. Электромотор в любом конструктивном исполнении содержит малоэффективную массу, то есть в центре маховика. Если обесточить электромотор, то он точно начнет отсасывать энергию из маховика. Если электромотор, то питание от автономного источника.
Ckona>> ...почему электромоторчик с маховиком не может быть гироскопом ?
Брат-2> В-третьих, я действительно думал об использовании коллекторного, или электромотора от CD для привода маховика. Но, используя внешний источник энергии можно подвести значительную, фактически не ограниченную мощность для раскрутки маховика.
Я долго ковырялся с безколлекторным двигателем-ротором для Г., однако решение было на поверхности - ухватился за вал мотора лотка CD-привода. Он, вращающийся по умолчанию, теперь стоит на месте, то-бишь закрепленный в рамке Г., а корпус-статор как раз-таки вращается. На пробных моделях было утяжеление в виде медной проволоки, намотанной на ротор. Но это уже не влезало в габариты планера(D=50мм). Однако, даже без утяжеления это работает, и не плохо.
В твоём случае корпус поболее, можно силовой Г. разработать из простецкого моторчика.
Брат-2> В-третьих, я действительно думал об использовании коллекторного, или электромотора от CD для привода маховика. Но, используя внешний источник энергии можно подвести значительную, фактически не ограниченную мощность для раскрутки маховика.
Я долго ковырялся с безколлекторным двигателем-ротором для Г., однако решение было на поверхности - ухватился за вал мотора лотка CD-привода. Он, вращающийся по умолчанию, теперь стоит на месте, то-бишь закрепленный в рамке Г., а корпус-статор как раз-таки вращается. На пробных моделях было утяжеление в виде медной проволоки, намотанной на ротор. Но это уже не влезало в габариты планера(D=50мм). Однако, даже без утяжеления это работает, и не плохо.
В твоём случае корпус поболее, можно силовой Г. разработать из простецкого моторчика.
Атмосфера> ... ухватился за вал мотора лотка CD-привода. Он, вращающийся по умолчанию, теперь стоит на месте, то-бишь закрепленный в рамке Г., а корпус-статор как раз-таки вращается. ...
Так мотор лотка CD обычный коллекторный, а провода как подводить, если статор вращается?
Так мотор лотка CD обычный коллекторный, а провода как подводить, если статор вращается?
 a_centaurus
a_centaurus

Ckona> почему электромоторчик с маховиком не может быть гироскопом ?
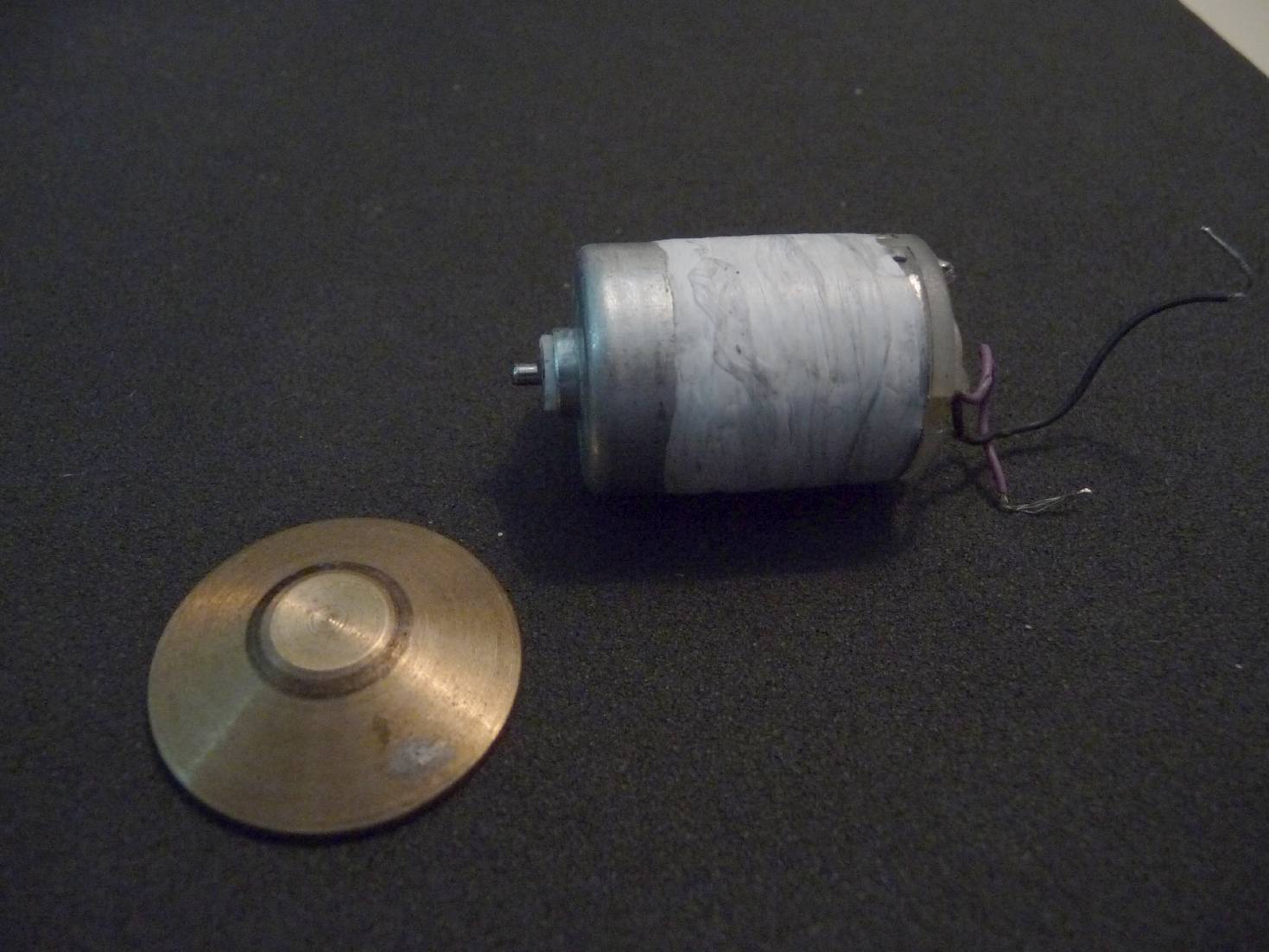
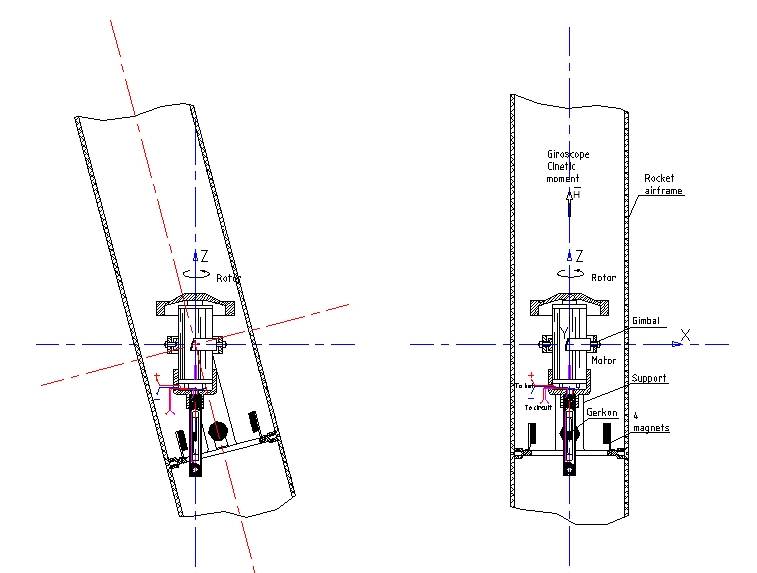
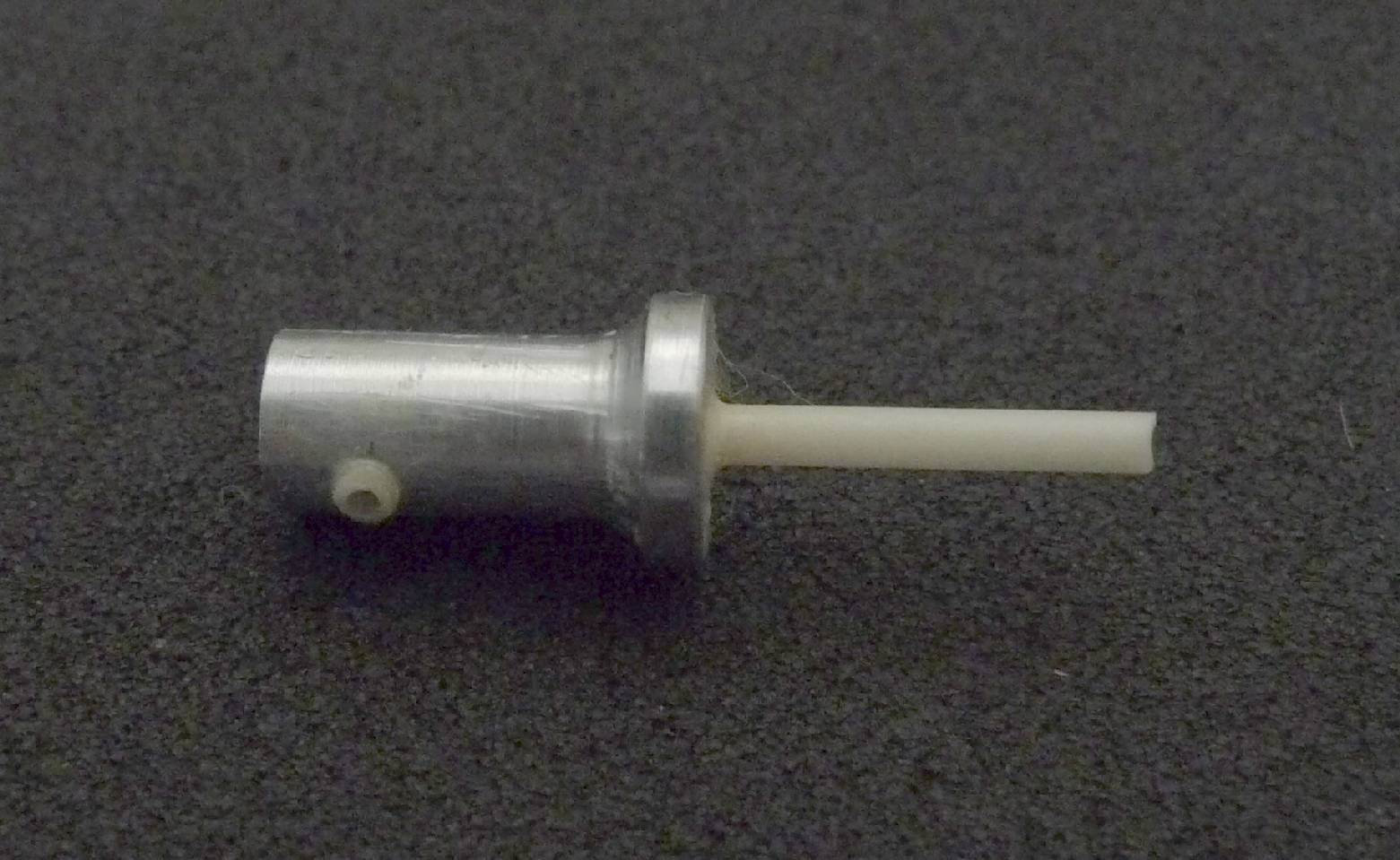
Почему нет. Вот такой мотор от серва с ротором из бронзы использовался в прототипе гироскопного датчика апогея. Он вообще-то на 3.5 тыс об/мин. И расчитан кажется на 4.5 В. Но я его раскручивал до 10000 об/мин (тахометр), используя акк. батарею 12 В. Где-то на 20 с вращения (на околопредельной скорости) его вполне хватало. И эта бат. предполагалась именно как внешний источник. Конечно, многое зависит от опор/подшипников и точности в точении (соосности) ротора. И его правильной формы (центральный диск с "юбкой" вниз). Эластичный подвес вряд ли можно использовать из-за непредсказуемой его реакции на изменение скорости. А кардан сложен в изготовлении. Хотя если вообще говорить о разработке подобной системы нужно обеспечить её как материалами и комплектующими, так и инструментальной базой. Поскольку сам гироскоп, это только часть разработки. И может не самая сложная. Если использовать реактивный принцип коррекции (те самые "пшикалки" aca thruster), то могу предложить тебе, ckona одну из возможных схем реализации. Достаточно простую как по логике, так и по дизайну и изготовлению. Основой в ней является карданный подвес с гироскопом, вектор момента которого направлен вдоль главной оси ракеты. В качестве хвостового противовеса служит трубка из немагнитного мат. с установленным внутрь герконом. Вокруг проекции опоры г., на расстояниях, обеспечивающих заданный угол отклонения по углам т/р установлены 4 дисковых магнита с магнитопроводами, образующими 4 (незамкнутых) сектора по 90град. При отклонении ракеты по курсу в любую сторону один из магнитных секторов замкнёт контакты г. В качестве исполнительных устройств предлагаются соленоидные микропневмоклапаны (на фото) оригинальной разработки. В количестве 4 единиц.
Почему нет. Вот такой мотор от серва с ротором из бронзы использовался в прототипе гироскопного датчика апогея. Он вообще-то на 3.5 тыс об/мин. И расчитан кажется на 4.5 В. Но я его раскручивал до 10000 об/мин (тахометр), используя акк. батарею 12 В. Где-то на 20 с вращения (на околопредельной скорости) его вполне хватало. И эта бат. предполагалась именно как внешний источник. Конечно, многое зависит от опор/подшипников и точности в точении (соосности) ротора. И его правильной формы (центральный диск с "юбкой" вниз). Эластичный подвес вряд ли можно использовать из-за непредсказуемой его реакции на изменение скорости. А кардан сложен в изготовлении. Хотя если вообще говорить о разработке подобной системы нужно обеспечить её как материалами и комплектующими, так и инструментальной базой. Поскольку сам гироскоп, это только часть разработки. И может не самая сложная. Если использовать реактивный принцип коррекции (те самые "пшикалки" aca thruster), то могу предложить тебе, ckona одну из возможных схем реализации. Достаточно простую как по логике, так и по дизайну и изготовлению. Основой в ней является карданный подвес с гироскопом, вектор момента которого направлен вдоль главной оси ракеты. В качестве хвостового противовеса служит трубка из немагнитного мат. с установленным внутрь герконом. Вокруг проекции опоры г., на расстояниях, обеспечивающих заданный угол отклонения по углам т/р установлены 4 дисковых магнита с магнитопроводами, образующими 4 (незамкнутых) сектора по 90град. При отклонении ракеты по курсу в любую сторону один из магнитных секторов замкнёт контакты г. В качестве исполнительных устройств предлагаются соленоидные микропневмоклапаны (на фото) оригинальной разработки. В количестве 4 единиц.

a_centaurus> Почему нет. Вот такой мотор от серва с ротором из бронзы использовался в прототипе гироскопного датчика апогея.
Нужен простейший коммутатор тока для управления этими устройствами. Поскольку геркон не может пропускать через себя токи более 100 мА (контакты привариваются). Устройство его обычное для соленоидных к. Катушка на железном сердечнике-статоре, втягивающийся активатор с прокладкой на торце и пружиной, г-образный коммутатор потока с системой вход-выход, пластиковый цилиндрический корпус (орстекло, delrin, PVC) и две крышки. Прототипом послужил клапан для большого плоттера, который нужно было заменить. Все материалы доступные. Конструкция достаточно простая и делается на простейших станках (токарный+сверлильный). Вес ок 20 г. Где-то был чертёж. Но и восстановить не проблема по оставшимся деталюшкам. Есть, конечно, готовые. И нужно поискать по Инету. Но, повторяю, сделать подобный клапан не сложно.
Логика работы: датчик гировертикали в случае отклонения по курсу активирует соответствующий клапан, который откроет магистраль от резервуара со сжатым воздухом (бутылка) и направит рабочее тело в соответствующее сопло, производя корректирующий импульс. При восстановлении положения контакт разомкнётся и клапан закроется. Ну и т.д. Система может быть отработана на стенде. Про воду, в качестве р.т. я не думал. Но, наверное возможно и с гидро. Хороший 12 В Li-polymer accu обеспечит надёжное питание с достаточными усилиями по управлению клапанами. По крайней мере на 3-5 Атм давления рабочего тела его можно рассчитывать. Размещение системы видится в голове ракеты, как и трастеров, поэтому чувствительность её будет достаточно высокой.
Нужен простейший коммутатор тока для управления этими устройствами. Поскольку геркон не может пропускать через себя токи более 100 мА (контакты привариваются). Устройство его обычное для соленоидных к. Катушка на железном сердечнике-статоре, втягивающийся активатор с прокладкой на торце и пружиной, г-образный коммутатор потока с системой вход-выход, пластиковый цилиндрический корпус (орстекло, delrin, PVC) и две крышки. Прототипом послужил клапан для большого плоттера, который нужно было заменить. Все материалы доступные. Конструкция достаточно простая и делается на простейших станках (токарный+сверлильный). Вес ок 20 г. Где-то был чертёж. Но и восстановить не проблема по оставшимся деталюшкам. Есть, конечно, готовые. И нужно поискать по Инету. Но, повторяю, сделать подобный клапан не сложно.
Логика работы: датчик гировертикали в случае отклонения по курсу активирует соответствующий клапан, который откроет магистраль от резервуара со сжатым воздухом (бутылка) и направит рабочее тело в соответствующее сопло, производя корректирующий импульс. При восстановлении положения контакт разомкнётся и клапан закроется. Ну и т.д. Система может быть отработана на стенде. Про воду, в качестве р.т. я не думал. Но, наверное возможно и с гидро. Хороший 12 В Li-polymer accu обеспечит надёжное питание с достаточными усилиями по управлению клапанами. По крайней мере на 3-5 Атм давления рабочего тела его можно рассчитывать. Размещение системы видится в голове ракеты, как и трастеров, поэтому чувствительность её будет достаточно высокой.

Это сообщение редактировалось 19.11.2011 в 00:56
Коммерческий соленоидный клапан Parker pulsed valve позади для сравнения.
Детали пневмоклапана.
Детали пневмоклапана.

Это сообщение редактировалось 19.11.2011 в 00:59
a_centaurus> В качестве хвостового противовеса служит трубка из немагнитного мат. с установленным внутрь герконом. Вокруг проекции опоры г., на расстояниях, обеспечивающих заданный угол отклонения по углам т/р установлены 4 дисковых магнита
Я уже писал, повторюсь: гораздо удобнее, чтобы не тянуть провода от подвешенного в кардане геркона, подвесить магнит, а вокруг поставить герконы.
a_centaurus> При отклонении ракеты по курсу в любую сторону один из магнитных секторов замкнёт контакты г.
Для датчика переворота этого достаточно. Но для стабилизации вертикали нужно знать, в какую сторону наклонилась ракета, а замыкание подвешенного геркона это не покажет. Подвешенный магнит и 4 геркона покажут.
Я уже писал, повторюсь: гораздо удобнее, чтобы не тянуть провода от подвешенного в кардане геркона, подвесить магнит, а вокруг поставить герконы.
a_centaurus> При отклонении ракеты по курсу в любую сторону один из магнитных секторов замкнёт контакты г.
Для датчика переворота этого достаточно. Но для стабилизации вертикали нужно знать, в какую сторону наклонилась ракета, а замыкание подвешенного геркона это не покажет. Подвешенный магнит и 4 геркона покажут.
Serge77> Для датчика переворота этого достаточно. Но для стабилизации вертикали нужно знать, в какую сторону наклонилась ракета, а замыкание подвешенного геркона это не покажет. Подвешенный магнит и 4 геркона покажут.
Ну а почему нет. Хорошая идея. С 4 герконами и магнитным подвесом и вправду получается изящнее и надёжнее.
Ну а почему нет. Хорошая идея. С 4 герконами и магнитным подвесом и вправду получается изящнее и надёжнее.


Атмосфера>> ... ухватился за вал мотора лотка CD-привода. Он, вращающийся по умолчанию, теперь стоит на месте, то-бишь закрепленный в рамке Г., а корпус-статор как раз-таки вращается.
Думаю, что ты обратив эл.мотор подвел один провод через штатную ось, а второй через закрепленную вторую добавленную изолированную половину оси и торцевой коллектор или бронзовую втулку подшипника. Или секрет?
a_centaurus> Ну а почему нет. Хорошая идея. С 4 герконами и магнитным подвесом и вправду получается изящнее и надёжнее.
К сожалению, к многочисленным «но» добавляется и гистерезис геркона. Да и связка геркон + магнит по порогу срабатывания устройство нестабильное. Конечно, можно попытаться использовать иные датчики в частности магнитные датчики на эффекте Холла от бесколлекторных электромоторов, или индукционные, или оптические, но в этом принципе стабилизации, предполагаю, есть более серьезные подводные камни.
Думаю, что ты обратив эл.мотор подвел один провод через штатную ось, а второй через закрепленную вторую добавленную изолированную половину оси и торцевой коллектор или бронзовую втулку подшипника. Или секрет?
a_centaurus> Ну а почему нет. Хорошая идея. С 4 герконами и магнитным подвесом и вправду получается изящнее и надёжнее.
К сожалению, к многочисленным «но» добавляется и гистерезис геркона. Да и связка геркон + магнит по порогу срабатывания устройство нестабильное. Конечно, можно попытаться использовать иные датчики в частности магнитные датчики на эффекте Холла от бесколлекторных электромоторов, или индукционные, или оптические, но в этом принципе стабилизации, предполагаю, есть более серьезные подводные камни.
Атмосфера>> ... ухватился за вал мотора лотка CD-привода. Он, вращающийся по умолчанию, теперь стоит на месте, то-бишь закрепленный в рамке Г., а корпус-статор как раз-таки вращается. ...
Брат-2> Так мотор лотка CD обычный коллекторный, а провода как подводить, если статор вращается?
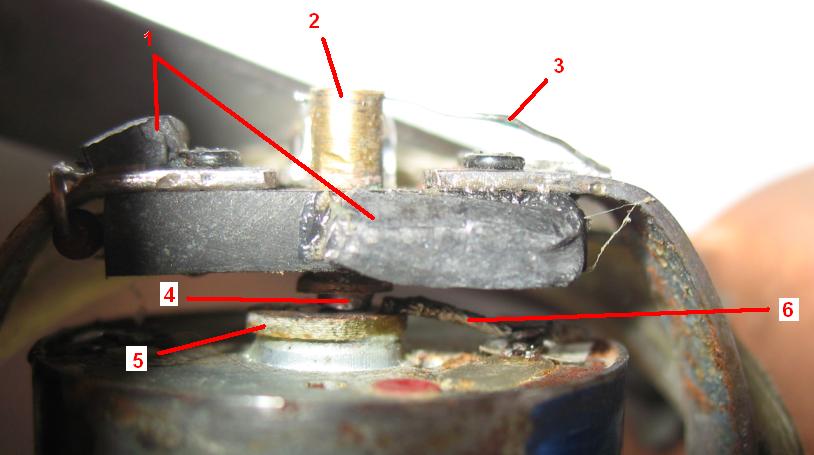
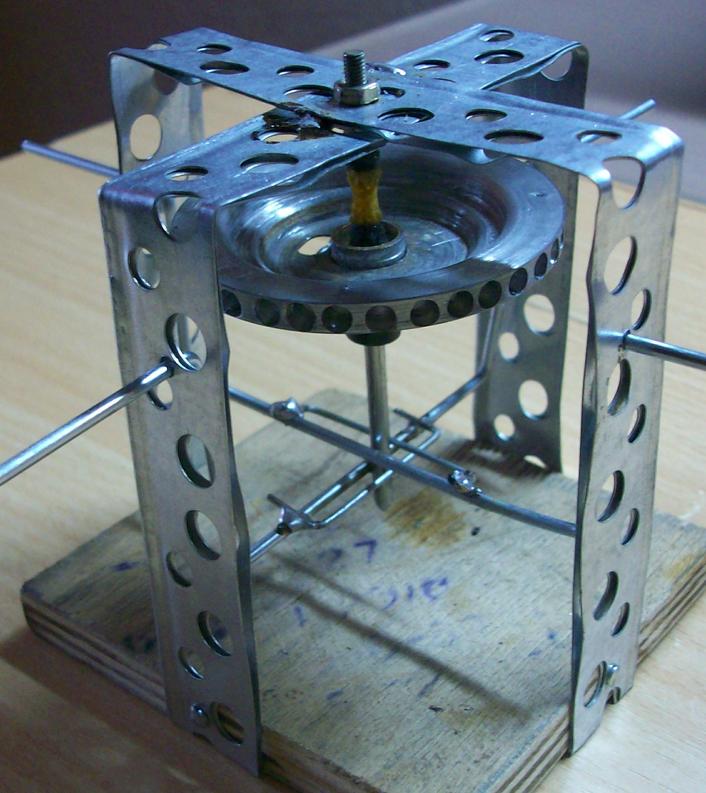
В том-то и прикол. Смотри фото.
Боковые части рамки - металлические, прикручены к пластиковым перемычкам, т.е. электрически не замкнуты. По одной даю плюс, по другой минус.
В нижней перемычке(не показана) - с натягом сидит вал мотора. К нему припаян провод, идущий от одной из боковин рамки. Вал контактирует через подшипник с корпусом. Один из выводов мотора запаян на корпус. Так подводится минус к одному из выводов.
По центру мотора между выводами приклеен пятачок фольгированного текстолита(5) - это токосъёмник. В верхней пластиковой перемычке с натягом посажена латунная втулка-щёткодержатель(2). В ней размещается кусочек грифеля от карандаша а-ля "щётка"(4). Щётка прижимается к пятачку пружинистой проволокой(3), которая припаяна на боковой части рамки, через которую подводится плюс. Токосъёмник соединен проводом со вторым выводом мотора. Ток идёт по рамке, по пружинке, по щётке, по токосъёмнику и на вывод. Так подводится плюс.
Эти штуки(1) - кусочки свинца, приклеены в разных местах, на месте подтачивал напильником до тех пор, пока не был достигнут баланс. Ещё видно резистор, это для яркого светодиода, он еле проглядывается за латунной втулкой.
Брат-2> Так мотор лотка CD обычный коллекторный, а провода как подводить, если статор вращается?
В том-то и прикол. Смотри фото.
Боковые части рамки - металлические, прикручены к пластиковым перемычкам, т.е. электрически не замкнуты. По одной даю плюс, по другой минус.
В нижней перемычке(не показана) - с натягом сидит вал мотора. К нему припаян провод, идущий от одной из боковин рамки. Вал контактирует через подшипник с корпусом. Один из выводов мотора запаян на корпус. Так подводится минус к одному из выводов.
По центру мотора между выводами приклеен пятачок фольгированного текстолита(5) - это токосъёмник. В верхней пластиковой перемычке с натягом посажена латунная втулка-щёткодержатель(2). В ней размещается кусочек грифеля от карандаша а-ля "щётка"(4). Щётка прижимается к пятачку пружинистой проволокой(3), которая припаяна на боковой части рамки, через которую подводится плюс. Токосъёмник соединен проводом со вторым выводом мотора. Ток идёт по рамке, по пружинке, по щётке, по токосъёмнику и на вывод. Так подводится плюс.
Эти штуки(1) - кусочки свинца, приклеены в разных местах, на месте подтачивал напильником до тех пор, пока не был достигнут баланс. Ещё видно резистор, это для яркого светодиода, он еле проглядывается за латунной втулкой.
Прикреплённые файлы:
a_centaurus> сделать подобный клапан не сложно.
Принято !
Первый шаг - оценить диапазон требуемых значений корректирующих импульсов.
По этой оценке - выбор рабочего тела и проходного сечения клапанов.
Принято !
Первый шаг - оценить диапазон требуемых значений корректирующих импульсов.
По этой оценке - выбор рабочего тела и проходного сечения клапанов.
a_centaurus> Про воду, в качестве р.т. я не думал. Но, наверное возможно и с гидро.
Если сжатый воздух (давление меньше 25 атм ! ) выталкивает воду, импульс получается больше, чем без воды.
Надо считать.
В комплексе.
Если сжатый воздух (давление меньше 25 атм ! ) выталкивает воду, импульс получается больше, чем без воды.
Надо считать.
В комплексе.
a_centaurus> Почему нет. Вот такой мотор от серва с ротором из бронзы использовался в прототипе гироскопного датчика апогея. .. используя акк. батарею 12 В. И эта бат. предполагалась именно как внешний источник. Конечно, многое зависит от опор/подшипников и точности в точении (соосности) ротора. И его правильной формы (центральный диск с "юбкой" вниз).
Почему у тебя такая форма бронзового маховика гироскопа? В моем понимании у маховика основная масса должна быть расположена по максимальному диаметру, а у тебя в точности наоборот. Ну, не будет подобный гироскоп долго вращается по инерции, внешней батареей можно помочь раскрутить маховик, а вот далее внутренняя должна поддерживать вращение, причем ее напряжение должно быть равным внешнего источника иначе обороты все равно упадут в соответствие с напряжением внутренней батареи, и достаточно быстро.
Атмосфера> В том-то и прикол. Смотри фото.
Спасибо! Значит, мне было правильно понятно, но я думал, что ты добавлял и изолированный вал, ведь имеющийся штатный достаточно тонкий, и консольное крепление рискованно. Интересно, а чем у тебя закончились опыты с мотором привода CD, если честно, то я ограничился лишь внешним их осмотром.
Почему у тебя такая форма бронзового маховика гироскопа? В моем понимании у маховика основная масса должна быть расположена по максимальному диаметру, а у тебя в точности наоборот. Ну, не будет подобный гироскоп долго вращается по инерции, внешней батареей можно помочь раскрутить маховик, а вот далее внутренняя должна поддерживать вращение, причем ее напряжение должно быть равным внешнего источника иначе обороты все равно упадут в соответствие с напряжением внутренней батареи, и достаточно быстро.
Атмосфера> В том-то и прикол. Смотри фото.
Спасибо! Значит, мне было правильно понятно, но я думал, что ты добавлял и изолированный вал, ведь имеющийся штатный достаточно тонкий, и консольное крепление рискованно. Интересно, а чем у тебя закончились опыты с мотором привода CD, если честно, то я ограничился лишь внешним их осмотром.
Было немного свободного времени, решил по-быстрому изготовить макет силового гироскопа. Ну, крутится, свистит, при изменении положения что-то корректирует, а вот выводов «0»! Гибкий подвес маховика ведет себя нормально, полный свободный выбег ротора 2м15с, то есть уж 10с отработает, но как? Изначально у меня по поводу подобной конструкции были сомнения, остались они и сейчас. Очень вероятно, что необходимо изготовить работающую конструкцию и проверить ее в реальном деле.
Прикреплённые файлы:
Брат-2> выбег ротора 2м15с
10 секунд "за глаза" хватит. Как ты планируешь "прочитать" угловое отклонение ?
Передать рычагами на рулевые органы ?
А_centaurus предлагает герконы.
Это релейная схема регистрации угловых отклонений.
Я же уверен, что для стабилизации нужно следить в первую очередь за угловой скоростью, а потом уж, если надо, за угловым положением(координатой).
Паллиатив: кодирующий диск и фотодатчики. Если фиксировать два положения угловой координаты, уже получаем какое-то представление об угловой скорости.
Есть еще другой нюанс. Из-за трения в подшипниках подвеса гироскоп переносит ошибку на другую ось. (с курса на тангаж, к примеру). Возможно, ее фактическая величина ничтожна даже на твоем макете.
10 секунд "за глаза" хватит. Как ты планируешь "прочитать" угловое отклонение ?
Передать рычагами на рулевые органы ?
А_centaurus предлагает герконы.
Это релейная схема регистрации угловых отклонений.
Я же уверен, что для стабилизации нужно следить в первую очередь за угловой скоростью, а потом уж, если надо, за угловым положением(координатой).
Паллиатив: кодирующий диск и фотодатчики. Если фиксировать два положения угловой координаты, уже получаем какое-то представление об угловой скорости.
Есть еще другой нюанс. Из-за трения в подшипниках подвеса гироскоп переносит ошибку на другую ось. (с курса на тангаж, к примеру). Возможно, ее фактическая величина ничтожна даже на твоем макете.
Брат-2> Почему у тебя такая форма бронзового маховика гироскопа? В моем понимании у маховика основная масса должна быть расположена по максимальному диаметру, а у тебя в точности наоборот.
Да, верно подмечено. Это я снял то, что осталось на сегодняшний день от изначального варианта. А он был такой как на эскизе вверху). Собственно это была уменьшенная копия колеса индустриального гироскопа фирмы Honeywell. Именно этот ротор я раскручивал до 10000 об/мин. Но он мне показался тяжёлым и кроме того, потребовал длинного хвостовика для лучшей стабилизации. Тогда и выточил новый, который унаследовал только центральную часть прежнего. С ним габариты устройства уменьшились, но, конечно, резко понизился и запас по моменту вращения. Однако это было не важно, поскольку гироскоп питался от батареи на борту. Я его планировал поставить на большую ракету с карамельным РДТТ на 3 KN, поэтому и места и запаса по массе было в достатке. Теперь, конечно всё это морально устарело в свете появления твердотельных инерциальных платформ. Наверно и для идеи ckona не нужно заморачиваться с непростой кинематикой роторного г., а использовать готовую и недорогую гироплатформу. У самого стоит на полке вертолётик с ИК контролем у которого сдохла батарея и я его периодически осматриваю на предмет извлечения органов контроля. Правда у него нет собственной стабилизации. Она в руке оператора.
Да, верно подмечено. Это я снял то, что осталось на сегодняшний день от изначального варианта. А он был такой как на эскизе вверху). Собственно это была уменьшенная копия колеса индустриального гироскопа фирмы Honeywell. Именно этот ротор я раскручивал до 10000 об/мин. Но он мне показался тяжёлым и кроме того, потребовал длинного хвостовика для лучшей стабилизации. Тогда и выточил новый, который унаследовал только центральную часть прежнего. С ним габариты устройства уменьшились, но, конечно, резко понизился и запас по моменту вращения. Однако это было не важно, поскольку гироскоп питался от батареи на борту. Я его планировал поставить на большую ракету с карамельным РДТТ на 3 KN, поэтому и места и запаса по массе было в достатке. Теперь, конечно всё это морально устарело в свете появления твердотельных инерциальных платформ. Наверно и для идеи ckona не нужно заморачиваться с непростой кинематикой роторного г., а использовать готовую и недорогую гироплатформу. У самого стоит на полке вертолётик с ИК контролем у которого сдохла батарея и я его периодически осматриваю на предмет извлечения органов контроля. Правда у него нет собственной стабилизации. Она в руке оператора.
Брат-2>...Интересно, а чем у тебя закончились опыты с мотором привода CD, если честно, то я ограничился лишь внешним их осмотром.
До победного не довёл. Тут: Канал пользователя Atmosphera27 - YouTube демонстрация работы ещё не отбалансированного. Сейчас отбалансирован, добавлен светодиод, он должен светить в оргстеклянный кольцевой коллектор-световод, я делел устройство для отлова переворота ракеты.
До победного не довёл. Тут: Канал пользователя Atmosphera27 - YouTube демонстрация работы ещё не отбалансированного. Сейчас отбалансирован, добавлен светодиод, он должен светить в оргстеклянный кольцевой коллектор-световод, я делел устройство для отлова переворота ракеты.
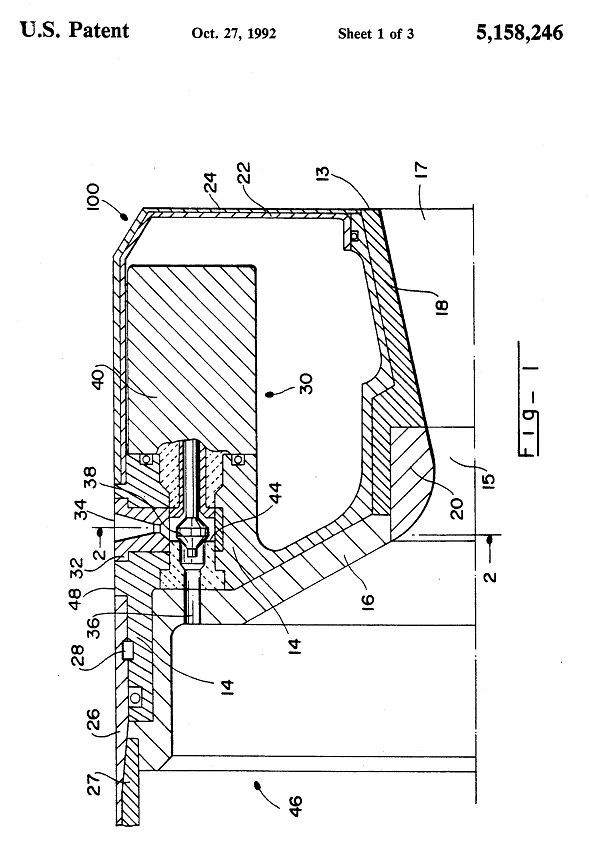
Ckona> Я же уверен, что для стабилизации нужно следить в первую очередь за угловой скоростью, а потом уж, если надо, за угловым положением(координатой).
Смотрел сейчас патенты и обнаружил этот: метод контроля вектора тяги при помощи плунжерного механизма. По сути это то, что я предложил выше по тексту. Потом нарисую свой вариант в применении к борту водной ракеты. Глубоко убеждён, что не нужно (по крайней мере на начальном этапе) заморачиваться с отслеживанием угловой скорости. В этом нет ни нужды. Поскольку для этого нет времени на date processing, ни скорости ответа системы. А лимитные датчики, настроенные на небольшой угол (скажем 5-8º) по осям т/р, даже с геркон-магнитной системой и cold gas thrusters способны повлиять на стабилизацию траектории. Я много работал с геркон-магнитными системами, в том числе и на борт. И могу утверждать, что они малоинертны, не имеют заметного гистерезиса и вполне надёжны. Правда, необходимы очень точные наложения магнитного поля на зону реакции капсулы. Поэтому идея с центральным магнитом интересна, но её нужно проработать с учётом геометрии магнитного поля. Когда я её пытался реализовать, то для уменьшения габаритов использовал цилиндрический магнит. Но так и не нашёл надёжного положения для него относительно высот чувствительной зоны для 4 герконов. Ведь боковая поверхность м. для этого не подходит. Надо было искать у торца. Поэтому, возможным решением будет головка из 4 дисковых магнитов.
Смотрел сейчас патенты и обнаружил этот: метод контроля вектора тяги при помощи плунжерного механизма. По сути это то, что я предложил выше по тексту. Потом нарисую свой вариант в применении к борту водной ракеты. Глубоко убеждён, что не нужно (по крайней мере на начальном этапе) заморачиваться с отслеживанием угловой скорости. В этом нет ни нужды. Поскольку для этого нет времени на date processing, ни скорости ответа системы. А лимитные датчики, настроенные на небольшой угол (скажем 5-8º) по осям т/р, даже с геркон-магнитной системой и cold gas thrusters способны повлиять на стабилизацию траектории. Я много работал с геркон-магнитными системами, в том числе и на борт. И могу утверждать, что они малоинертны, не имеют заметного гистерезиса и вполне надёжны. Правда, необходимы очень точные наложения магнитного поля на зону реакции капсулы. Поэтому идея с центральным магнитом интересна, но её нужно проработать с учётом геометрии магнитного поля. Когда я её пытался реализовать, то для уменьшения габаритов использовал цилиндрический магнит. Но так и не нашёл надёжного положения для него относительно высот чувствительной зоны для 4 герконов. Ведь боковая поверхность м. для этого не подходит. Надо было искать у торца. Поэтому, возможным решением будет головка из 4 дисковых магнитов.
Прикреплённые файлы:
a_centaurus> использовал цилиндрический магнит. Но так и не нашёл надёжного положения для него относительно высот чувствительной зоны для 4 герконов
Геркон срабатывает как раз когда цилиндрический магнит с полюсами на концах прикладывается к геркону параллельно корпусу геркона.
Геркон срабатывает как раз когда цилиндрический магнит с полюсами на концах прикладывается к геркону параллельно корпусу геркона.
Брат-2>> выбег ротора 2м15с
Ckona> 10 секунд "за глаза" хватит. Как ты планируешь "прочитать" угловое отклонение ?
Ckona> Передать рычагами на рулевые органы ?
Так на макете видны рычаги, через которые передается непосредственное усилие от неподвижной оси маховика к рулям. Действительно если плавно менять положение платформы, то устройство ведет себя на глазок адекватно, но если резко сменить положение, то маховик бросает в сторону и не понятно, правильно это или нет, очень вероятно, что все утопия. Использовать дискретный или даже аналоговый сигнал положения ротора гироскопа мало, что дает. Как увязать управляющий сигнал с реакцией рулевых машинок? С твердотельными готовыми платами гироскопов тоже ясности мало, они не дают пригодный для управления сигнал его еще надо получить. Пересмотрел весь материал по примерно такой тематике на форуме, одни благие намерения и туман как в бане!
Ckona> 10 секунд "за глаза" хватит. Как ты планируешь "прочитать" угловое отклонение ?
Ckona> Передать рычагами на рулевые органы ?
Так на макете видны рычаги, через которые передается непосредственное усилие от неподвижной оси маховика к рулям. Действительно если плавно менять положение платформы, то устройство ведет себя на глазок адекватно, но если резко сменить положение, то маховик бросает в сторону и не понятно, правильно это или нет, очень вероятно, что все утопия. Использовать дискретный или даже аналоговый сигнал положения ротора гироскопа мало, что дает. Как увязать управляющий сигнал с реакцией рулевых машинок? С твердотельными готовыми платами гироскопов тоже ясности мало, они не дают пригодный для управления сигнал его еще надо получить. Пересмотрел весь материал по примерно такой тематике на форуме, одни благие намерения и туман как в бане!
Брат-2> Пересмотрел весь материал по примерно такой тематике на форуме, одни благие намерения и туман как в бане!
Присоединяюсь !
Очень велика пропасть между "взрослыми" ракетами (почитай хотя бы воспоминания Дорнбергера)
и возможностями одиночек-любителей.
Чтобы развивать направление не на словах, я создал тему "Юла".
Если честно - несколько ошарашен простотой твоего решения: от гироскопа - на рули
Присоединяюсь !
Очень велика пропасть между "взрослыми" ракетами (почитай хотя бы воспоминания Дорнбергера)
и возможностями одиночек-любителей.
Чтобы развивать направление не на словах, я создал тему "Юла".
Если честно - несколько ошарашен простотой твоего решения: от гироскопа - на рули
Copyright © Balancer 1997..2021
Создано 24.04.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 24.04.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
