-
![[image]](https://www.balancer.ru/cache/sites/com/mi/mikroe/img/development-tools/pic/easypic_v7/128x128-crop/thumb_easypic_v7.png)
Кобра III
Теги:
 Xan
Xan

Non-conformist>
Парафазного выхода шима у пиков не видел. Поэтому парафазность или надо делать отдельным железным инвертором, или другой ногой пика.
Но на другой ноге шима не будет, а можно сделать только знак.
Именно это когда-то и было задумано.
Не вижу причин что-то менять в планах.
Парафазного выхода шима у пиков не видел. Поэтому парафазность или надо делать отдельным железным инвертором, или другой ногой пика.
Но на другой ноге шима не будет, а можно сделать только знак.
Именно это когда-то и было задумано.
Не вижу причин что-то менять в планах.


 инфо
инфо инструменты
инструменты Semenov
Semenov

Semenov
втянувшийся
Я добавил материалы по проекту в папку ДБ. Попросил Гоги сделать отдельную папку для кучи файлов IAR AVR разбросаных в корне общей папки - так наверно удобней будет.
Non-conformist, в ДБ положил Тимвьювер, поставь пожалуйста. Хочу зайти на твой ПК как сообщишь разовый айди и пароль и установить настроить тебе ПО для компиляции программ.
Xan> Парафазного выхода шима у пиков не видел.
Противофазный ШИМ (вроде комплементарным его называют в дш) с дедтаймом есть в PIC для электропривода (так же как и в AVR ARM и т.п.) - заходишь в microchip и смотришь электропривод")
Xan> надо делать отдельным железным инвертором
Это ОЧЕВИДНО идеальный ЖЕЛЕЗНЫЙ вариант для этих силовых драйверов, обычный инвертор типа 74hc14 в SOIC16 аж 6 штук. Не надо будет мудрить с ШИМ - 1 параметр будет - 127 это "ноль" для мотора.
Non-conformist, в ДБ положил Тимвьювер, поставь пожалуйста. Хочу зайти на твой ПК как сообщишь разовый айди и пароль и установить настроить тебе ПО для компиляции программ.
Xan> Парафазного выхода шима у пиков не видел.
Противофазный ШИМ (вроде комплементарным его называют в дш) с дедтаймом есть в PIC для электропривода (так же как и в AVR ARM и т.п.) - заходишь в microchip и смотришь электропривод
Xan> надо делать отдельным железным инвертором
Это ОЧЕВИДНО идеальный ЖЕЛЕЗНЫЙ вариант для этих силовых драйверов, обычный инвертор типа 74hc14 в SOIC16 аж 6 штук. Не надо будет мудрить с ШИМ - 1 параметр будет - 127 это "ноль" для мотора.


Xan>> надо делать отдельным железным инвертором
Semenov> Это ОЧЕВИДНО идеальный ЖЕЛЕЗНЫЙ вариант для этих силовых драйверов, обычный инвертор типа 74hc14 в SOIC16 аж 6 штук.
Ну вот я 74HC14 и поставил. Она ещё для одного полезна - у L298 Enable высоким уровнем, я поставил инвертор между ножкой авр-ки и ножкой L298, и этот вход 74HC14 100 кОм подтянул на плюс. Без него на землю пришлось бы ставить 1 кОм.
Semenov> Это ОЧЕВИДНО идеальный ЖЕЛЕЗНЫЙ вариант для этих силовых драйверов, обычный инвертор типа 74hc14 в SOIC16 аж 6 штук.
Ну вот я 74HC14 и поставил. Она ещё для одного полезна - у L298 Enable высоким уровнем, я поставил инвертор между ножкой авр-ки и ножкой L298, и этот вход 74HC14 100 кОм подтянул на плюс. Без него на землю пришлось бы ставить 1 кОм.
Semenov
втянувшийся
Б.г.> Ну вот я 74HC14 и поставил.
Эх! еслиб да кабы у драйвера был 1 вход инвертирован. Соединил их вместе да колбась. И раздельно тоже легко было бы использовать, так как у современных мк почти всегда можно выбирать полярность выходов ШИМ.
Эх! еслиб да кабы у драйвера был 1 вход инвертирован. Соединил их вместе да колбась. И раздельно тоже легко было бы использовать, так как у современных мк почти всегда можно выбирать полярность выходов ШИМ.
 Non-conformist
Non-conformist

> Semenov
Сергей! Давай подумаем, куда переложить предложенные тобой материалы из общей папки ДБ. Бо так не пойдёт - дома у меня пишет "до момента синхронизации осталось пять часов", а на работе мне вообще в день дают 60 МБ всего - я неделю ДБ синхронизировать буду.
Что нужно оставить в общей папке ДБ:
- сишные тексты, предназначенные для совместной работы (нуждающиеся в постоянной синхронизации между компами участников)
- лёгкие текстовки (пояснения, общение вне форума, когда авиабаза лежит)
- векторный формат (чертежи, небольшие пдф-ки)
- лёгкие фотки
ВСЁ. Ничего другого в ОБЩУЮ папку ДБ класть НЕ НАДО! ))
Сергей! Давай подумаем, куда переложить предложенные тобой материалы из общей папки ДБ. Бо так не пойдёт - дома у меня пишет "до момента синхронизации осталось пять часов", а на работе мне вообще в день дают 60 МБ всего - я неделю ДБ синхронизировать буду.
Что нужно оставить в общей папке ДБ:
- сишные тексты, предназначенные для совместной работы (нуждающиеся в постоянной синхронизации между компами участников)
- лёгкие текстовки (пояснения, общение вне форума, когда авиабаза лежит)
- векторный формат (чертежи, небольшие пдф-ки)
- лёгкие фотки
ВСЁ. Ничего другого в ОБЩУЮ папку ДБ класть НЕ НАДО! ))



поддержу, у меня на одном из компьютеров мобильный интернет и основной траффик там и так синхронизация DropBox.
Все тяжелое можно ложить каждый в свою папку, и расшаривать её ссылкой на скачивание. А в общей только легкое.
Все тяжелое можно ложить каждый в свою папку, и расшаривать её ссылкой на скачивание. А в общей только легкое.

Еще. Если работать в IAR и Proteus, то всем причастным надо замапить общую папку Dropbox на виртуальный диск.
Делается это вот такой командой
subst M: "C:\Documents and Settings\user\Мои документы\Dropbox\Новая папка"
Это я замапил на диск M.
Буква диска у всех должна быть одинакова. Иначе нормально связка IAR-proteus работать не будет.
Делается это вот такой командой
subst M: "C:\Documents and Settings\user\Мои документы\Dropbox\Новая папка"
Это я замапил на диск M.
Буква диска у всех должна быть одинакова. Иначе нормально связка IAR-proteus работать не будет.
Non-conformist>>
Xan> Парафазного выхода шима у пиков не видел. Поэтому парафазность или надо делать отдельным железным инвертором, или другой ногой пика.
У меня схема так и сделана: на каждый драйвер по две ноги МК: ШИМ-нога и простая (для инверсии).
И я не совсем понял, можно ли / сложно ли сделать классический ШИМ с дед-полосой программным образом?
С моторами вроде разобрался. Печной ШИМ - аналог дед-полосы: на удержание ротора на месте электроэнергии не тратится. Классика же (без моторного дед-тайма), судя по ощущениям в пальце, прижатом к заднему подшипнику моторчика (там совсем рядом коллектор), греет мотор при удержании (нуле) точно так же, как и при работе на полных оборотах. Так оно и должно быть. Только одно непонятно - тормозится ротор как-то некачественно. Как изрядно подгулявший ручник в авто. )) Практически не чувствуется. Т.е. как бы "не в коня корм"... ???
Поставил резистор 18 Ом последовательно с мотором. Дым с мотора идти перестал. )) На заднем подшипнике можно постоянно держать палец. Разгон, понятное дело, вялый. Но это имхо только для эксперимента - в реальной работе в системе ПИД (с ОС от гироскопа) столько тепла выделяться просто не будет успевать при любых раскладах.
В связи с тем, что была обнаружена ошибка с заземлением, прошу Xan вернуть в прошивку печной вариант. Хочу попробовать ещё раз.
Xan> Парафазного выхода шима у пиков не видел. Поэтому парафазность или надо делать отдельным железным инвертором, или другой ногой пика.
У меня схема так и сделана: на каждый драйвер по две ноги МК: ШИМ-нога и простая (для инверсии).
И я не совсем понял, можно ли / сложно ли сделать классический ШИМ с дед-полосой программным образом?
С моторами вроде разобрался. Печной ШИМ - аналог дед-полосы: на удержание ротора на месте электроэнергии не тратится. Классика же (без моторного дед-тайма), судя по ощущениям в пальце, прижатом к заднему подшипнику моторчика (там совсем рядом коллектор), греет мотор при удержании (нуле) точно так же, как и при работе на полных оборотах. Так оно и должно быть. Только одно непонятно - тормозится ротор как-то некачественно. Как изрядно подгулявший ручник в авто. )) Практически не чувствуется. Т.е. как бы "не в коня корм"... ???
Поставил резистор 18 Ом последовательно с мотором. Дым с мотора идти перестал. )) На заднем подшипнике можно постоянно держать палец. Разгон, понятное дело, вялый. Но это имхо только для эксперимента - в реальной работе в системе ПИД (с ОС от гироскопа) столько тепла выделяться просто не будет успевать при любых раскладах.
В связи с тем, что была обнаружена ошибка с заземлением, прошу Xan вернуть в прошивку печной вариант. Хочу попробовать ещё раз.
Non-conformist> В связи с тем, что была обнаружена ошибка с заземлением, прошу Xan вернуть в прошивку печной вариант. Хочу попробовать ещё раз.
Там в PWM.c оба варианта.
Но один из них закомментирован двумя парами символов делить-умножить. Вот так:
/*
Это комментарий, Ну, ты, наверное, это знаешь.
*/
Сейчас раскомментировал старый.
Там в PWM.c оба варианта.
Но один из них закомментирован двумя парами символов делить-умножить. Вот так:
/*
Это комментарий, Ну, ты, наверное, это знаешь.
*/
Сейчас раскомментировал старый.
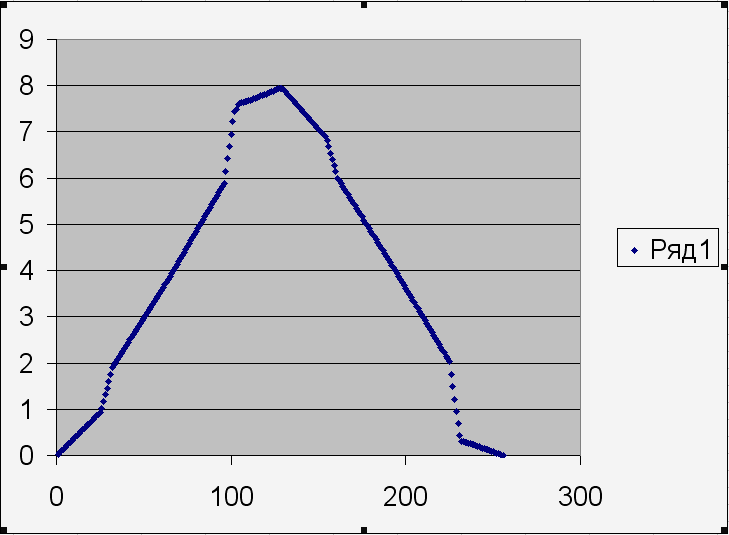
Объединёнными усилиями Алма-атинско-Черниговской группировки удалось наладить печной ШИМ таким образом, что на выходе "тупого драйвера" (который оказался не таким уж и тупым, а вполне со своим взглядом на внешний мир) получился линейный закон регулирования напряжения на электромоторе. Выкладываю кривули. Вот что было:
... и что стало после снижения частоты программного ШИМ:
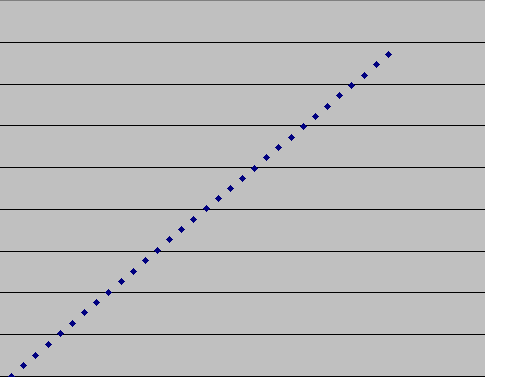
Ещё раз то что было, в картинках:
Прикреплённые файлы:

Xan! Завтра жду окончательную прошивку демонстрационного варианта линейного реверсивного ШИМ ! Количество градаций, думаю, можно оставить без изменений.
Эйфория! Наконец-то система заработала так, как от неё требовалось... На данном этапе. ))
зы: Покрутил мотор последней прошивой. Всё ЧОТКО, как и показывает тестер. Теперь реверс. РЕВЕРС!
Эйфория! Наконец-то система заработала так, как от неё требовалось... На данном этапе. ))
зы: Покрутил мотор последней прошивой. Всё ЧОТКО, как и показывает тестер. Теперь реверс. РЕВЕРС!
Semenov
втянувшийся
Non-conformist> РЕВЕРС!
Вот с реверсом версия D928 - явно ЧИМ низкочастотный.
В proteus нашел и исправил в pwm.c вместо -31 было написано -3
C dropbox не разобрался,
ГИРУ ДАВАЙ!!!!!!!! дААААААА
Вот с реверсом версия D928 - явно ЧИМ низкочастотный.
В proteus нашел и исправил в pwm.c вместо -31 было написано -3
C dropbox не разобрался,
извините
. Переместил все в свою папку db и ссылку дал в папке сообщений участникам в "новая папка"ГИРУ ДАВАЙ!!!!!!!! дААААААА
Это сообщение редактировалось 28.09.2013 в 06:40
Semenov
втянувшийся
Non-conformist> Semenov! Ночами СПАТЬ надо! ))
Да я спал, че-то проснулся да компик включил. вот и подправил прогу чуток.
Какой источник силового питания используется? Напряжение, ток?
А вообще то надо брать модельный регулятор хода и бесколлекторник. А МК выдавал бы 50 раз в сек управляющие импульсы - это проще простого, а если много импульсов надо то через микруху 74hc4017 удобно формировать до 8 серво сигналов.
При этом и регулятор бесколлекторника и бесколлекторник ни как бы не пострадали и в дальнейшем можно было бы использовать в других проектах.
Правильно ИМХО сделать вот такую плату: Опенсоус (открытый проект) с визуализатором для ПК платка мозг для бпла коптеров сталиблизация камеры, все алгоритмы уже применены, отлажены, встроены - Mongoose 9DoF IMU with Barometric Pressure Sensor - ckdevices.
Можно на безпаячной макетке собрать для тестов.
Да я спал, че-то проснулся да компик включил. вот и подправил прогу чуток.
Какой источник силового питания используется? Напряжение, ток?
А вообще то надо брать модельный регулятор хода и бесколлекторник. А МК выдавал бы 50 раз в сек управляющие импульсы - это проще простого, а если много импульсов надо то через микруху 74hc4017 удобно формировать до 8 серво сигналов.
При этом и регулятор бесколлекторника и бесколлекторник ни как бы не пострадали и в дальнейшем можно было бы использовать в других проектах.
Правильно ИМХО сделать вот такую плату: Опенсоус (открытый проект) с визуализатором для ПК платка мозг для бпла коптеров сталиблизация камеры, все алгоритмы уже применены, отлажены, встроены - Mongoose 9DoF IMU with Barometric Pressure Sensor - ckdevices.
Можно на безпаячной макетке собрать для тестов.
Прикреплённые файлы:

Semenov
втянувшийся
i2c в mplab х пример и отладка - Serial Communication – I2C EEPROM using MPLAB X IDE | chipKIT Development Platform
Non-conformist> зы: Покрутил мотор последней прошивой. Всё ЧОТКО, как и показывает тестер. Теперь реверс. РЕВЕРС!
Сейчас попытался посмотреть PWM.c - там в тексте вроде присутствует условие изменения направления вращения? Но в реале мотор крутится и регулируется только в одну сторону... А хотелось бы чтобы через ноль в обе стороны. Чтобы надёжно убедиться, что всё линейно регулируется и туда, и обратно... Можно ли такое сделать?
Да, и какая сейчас установлена средняя частота ШИМ? Ведь это печной вариант (ШИМ-ИКМ-ЧИМ), только с пониженной средней частотой? Намного ли пришлось уменьшить частоту, чтобы появилась линейность регулировки на выходе драйвера?
Сейчас попытался посмотреть PWM.c - там в тексте вроде присутствует условие изменения направления вращения? Но в реале мотор крутится и регулируется только в одну сторону... А хотелось бы чтобы через ноль в обе стороны. Чтобы надёжно убедиться, что всё линейно регулируется и туда, и обратно... Можно ли такое сделать?
Да, и какая сейчас установлена средняя частота ШИМ? Ведь это печной вариант (ШИМ-ИКМ-ЧИМ), только с пониженной средней частотой? Намного ли пришлось уменьшить частоту, чтобы появилась линейность регулировки на выходе драйвера?
Semenov> Какой источник силового питания используется? Напряжение, ток?
16 В (4 х 18650); ампер пять могут дать, я думаю. Может посоветуешь что полегче, но не модельное (недорогое)? Не уверен, что четвёртый аккумулятор нужен, имхо вполне хватит и трёх, а то и двух.
Для лётного питания платы МК планирую аккумулятор от мобильного телефона. На ебае видел совсем недорогие. По-моему вполне подходящий вариант...
16 В (4 х 18650); ампер пять могут дать, я думаю. Может посоветуешь что полегче, но не модельное (недорогое)? Не уверен, что четвёртый аккумулятор нужен, имхо вполне хватит и трёх, а то и двух.
Для лётного питания платы МК планирую аккумулятор от мобильного телефона. На ебае видел совсем недорогие. По-моему вполне подходящий вариант...
Non-conformist> 16 В (4 х 18650); ампер пять могут дать, я думаю.
А могут и не дать.
У них же там защита встроенная.
Бери для моделек.
(http://hobbyking.com/hobbyking/...)
2-элементные начинаются от 2.90 баксов.
4-элементные немного дороже, от 8.40.
(Rhino 610mAh 3S 11.1v 20C Lipoly Pack)
А могут и не дать.
У них же там защита встроенная.
Бери для моделек.
(http://hobbyking.com/hobbyking/...)
2-элементные начинаются от 2.90 баксов.
4-элементные немного дороже, от 8.40.
(Rhino 610mAh 3S 11.1v 20C Lipoly Pack)
Это сообщение редактировалось 29.09.2013 в 00:16
Semenov
втянувшийся
Non-conformist> РЕВЕРС! хотелось бы чтобы через ноль в обе стороны.
Выше ведь положил D928 с вращением в обе стороны.
Non-conformist> какая сейчас установлена средняя частота ШИМ?
Там ЧИМ, таймер прерывает 3600 Гц. Т.е. на старте или при команеде "0" получаем меандр частотой 1800 Гц.
Non-conformist> планирую аккумулятор от мобильного телефона.
Надо припаять на него нормальный разъем, ИМХО лучше взять акум серебристый плоский с платой управления и выводами с разъемом.
Если МК будет питатья от акума на 3,7 вольт то после защиты на затворы ключей наверно 3 вольта будет подаваться.
Выше ведь положил D928 с вращением в обе стороны.
Non-conformist> какая сейчас установлена средняя частота ШИМ?
Там ЧИМ, таймер прерывает 3600 Гц. Т.е. на старте или при команеде "0" получаем меандр частотой 1800 Гц.
Non-conformist> планирую аккумулятор от мобильного телефона.
Надо припаять на него нормальный разъем, ИМХО лучше взять акум серебристый плоский с платой управления и выводами с разъемом.
Если МК будет питатья от акума на 3,7 вольт то после защиты на затворы ключей наверно 3 вольта будет подаваться.
Это сообщение редактировалось 29.09.2013 в 11:36
Semenov
втянувшийся
Non-conformist, поставь уже PROTEUS 8 и будешь видеть все в секундах и в микро-сек и в Гц и напруги и токи - ВСЁ! Прямо из PROTEUS сможет править код и перекомпилировать в том же picc что и Xan делает, сразу запускать выполнение.
Это сообщение редактировалось 29.09.2013 в 11:39
Сергей! Нужны библиотеки LIS331DL ! А то Александер уже врукопашную всё пишет, с нулевого нуля, по ДШ. Нельзя ли помочь?
Хех... Поздно уже помогать! )) Во даёт...
Copyright © Balancer 1997..2019
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 04.01.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
