 roker2019
roker2019
 инфо
инфо инструменты
инструменты Hal
Hal







 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/a0/a0z/f/2019/07/128x128-crop/19-7700921-gorapavilon.jpg)
Apollo 16 LRV Grand Prix в вакуумной камере
Теги:

3-62> А на самом деле - оно такое по объективным причинам. Но у вас же опровергунской слепоты приступ...
Лукавите. Телекамера стояла далеко, а на кинокамеру они этот чудо маятник не засняли, хотя бегали там с этой кинокамерой будь здоров. И то и другое абсолютно субъективные причины.
Лукавите. Телекамера стояла далеко, а на кинокамеру они этот чудо маятник не засняли, хотя бегали там с этой кинокамерой будь здоров. И то и другое абсолютно субъективные причины.



aФон> Ты лучше по теме придумай отмазку
Мне то зачем? Я ж не дебил. И не хочу стать таким дебилом как ты.
aФон> почему в угол обзора камеры не влезает рельеф карты, который показан в кадрах тематического ролика
aФон> Почему аферисты насыпали горы слишком узкими?
Есть одно очень хорошее объяснение - у афона руки растут из задницы и всё что он делает у него получается через это место. И никаких афер не надо выдумывать.
Мне то зачем? Я ж не дебил. И не хочу стать таким дебилом как ты.
aФон> почему в угол обзора камеры не влезает рельеф карты, который показан в кадрах тематического ролика
aФон> Почему аферисты насыпали горы слишком узкими?
Есть одно очень хорошее объяснение - у афона руки растут из задницы и всё что он делает у него получается через это место. И никаких афер не надо выдумывать.


aФон>> Почему аферисты насыпали горы слишком узкими?
Hal> Есть одно очень хорошее объяснение - у афона руки растут из задницы
Ну нарисуй руками, которые растут из передницы.
Почему же никто не нарисовал?
Это как с параллаксом, так никто и не смог получить его отсутствие, а сколько вони про то, что "кривые руки", ну сделай прямыми..
Hal> Есть одно очень хорошее объяснение - у афона руки растут из задницы
Ну нарисуй руками, которые растут из передницы.
Почему же никто не нарисовал?
Это как с параллаксом, так никто и не смог получить его отсутствие, а сколько вони про то, что "кривые руки", ну сделай прямыми..
aФон> Ну нарисуй руками, которые растут из передницы.
Мне то зачем? Специалисты уже всё нарисовали, написали статьи, которые прошли рецензию и критику. На них всё чётко и ровно.
А на жопоруких поделках какого-то неудачника всё всегда криво и косо. Делать мне больше нечего, как доказывать что этот неудачник просто дебил. Наука уже всё доказала.
aФон> Это как с параллаксом, так никто и не смог получить его отсутствие
Все получили. И получили от тебя уже несколько бабских истерик, что мол какая-то функция там мошенническая чего-то там уничтожает, что кто-то гифку не так склеил, и т.д. Зачем ещё раз что-то делать, если ты придумаешь себе очередное шизофреническое оправдание? Выдумаешь себе очередные тупые определения слов, припишешь магические способности софту и функциям и т.д.
Мне то зачем? Специалисты уже всё нарисовали, написали статьи, которые прошли рецензию и критику. На них всё чётко и ровно.
А на жопоруких поделках какого-то неудачника всё всегда криво и косо. Делать мне больше нечего, как доказывать что этот неудачник просто дебил. Наука уже всё доказала.
aФон> Это как с параллаксом, так никто и не смог получить его отсутствие
Все получили. И получили от тебя уже несколько бабских истерик, что мол какая-то функция там мошенническая чего-то там уничтожает, что кто-то гифку не так склеил, и т.д. Зачем ещё раз что-то делать, если ты придумаешь себе очередное шизофреническое оправдание? Выдумаешь себе очередные тупые определения слов, припишешь магические способности софту и функциям и т.д.

Hal> Все получили. И получили от тебя уже несколько бабских истерик, что мол какая-то функция там мошенническая чего-то там уничтожает, что кто-то гифку не так склеил, и т.д. Зачем ещё раз что-то делать, если ты придумаешь себе очередное шизофреническое оправдание? Выдумаешь себе очередные тупые определения слов, припишешь магические способности софту и функциям и т.д.
Это не истерики, а строгие обоснования, почему нельзя применять вышеуказанные функции
Это не истерики, а строгие обоснования, почему нельзя применять вышеуказанные функции
Нельзя использовать исправление дисторсии в нашем случае, Красильников доходчиво объяснял почему
Во-первых, он анаморфированный. Т.е. искажены пропорции кадра. Кадр на 16-мм кинопленке имеет пропорции 4:3 или около того. А в ролике пропорции сильно отличаются.
Для Hugin это имеет катастрофические последствия: Hugin при пересчетах кадров отталкивается от радиусов точек от центра кадра, а при искажении пропорций точки, которые были на одинаковых радиусах, окажутся на разных.
(Кому не лень, тот может поставить эксперимент: взять два снимка, совместить, потом сжать их по вертикали и снова совместить.)
> Как снимали лунную аферу... [Yuri Krasilnikov#27.04.19 08:07]
Если его слова не ясны, то разжевываю:
Barrel Distortion задётся уравнением:
R = ( a * r3 + b * r2 + c * r + d ) * r
где r - расстояние от пикселя до центра кадра на исправленном изображении, R - расстояние от пикселя до
центра кадра на исходном изображении (искажённом дисторсией)
Это уравнение задёт с одной стороны саму дисторсию, с другой стороны формулу исправления дисторсии для
механизма Reverse Pixel Mapping.
r=1 соответствует ближайшему к центру краю снимка (половина высоты для горизонтального снимка), по
умолчанию этот радиус сохраняется, т.е. r=1 => R=1
Отсюда получается формула для 4-го параметра:
d = 1 - a - b - c
При сохранении другого радиуса (r0): d = 1 - a*r03 - b*r02 - c*r0
Прямая линия на исправленном изображении имеет уравнение:
p*x + q*y + 1 = 0
в радиальных координатах:
p*r*cos(f) + q*r*sin(f) + 1 = 0
Таким образом у нас 5 неизвестных: a,b,c,p,q => а значит нам нужно 5 уравнений их для нахождения.
Из координат (X,Y) заданных точек на искажённом изображении получаем их радиальные координаты R и f
Угол f и уравление прямой дают нам возможность посчитать r - расстояние на исправленном изображении.
r = -1/(p*cos(f)+q*sin(f))
Из этого значения и уравнения Barrel Distortion для каждой точки можно посчитать R' - расстояние на
искажённом изображении.
R' = (a*r3 + b*r2 + c*r + d)*r
Нам нужны параметры Barrel Distortion, при которых R' = R
Каждая точка даёт одно уравнение, однако это сложные нелинейные уравнения. Их можно решить численно
через оптимизацию целевой функции.
В целом нам нужно добиться, чтобы заданные точки оказались в результате Barrel Distortion на тех же
местах, поэтому из R' и f получаем (X',Y')
Целевая функция оптимизации - сумма квадратов расстояний (X,Y)-(X',Y') по всем точкам:
Norm = Summ ( (X-X')2 + (Y-Y')2 )
Эту функцию необходимо минимизировать подбором неизвестных a,b,c,p,q
Если задать более 5 точек, то можно оценить точность нахождения параметров.
> Исправление сильной дисторсии / "рыбьего глаза" вручную: overquantum — ЖЖ
Если кто и сейчас не понял, то повторяю, в формулы дисторсии входит РАДИУС, а значит важна правильная пропорция кадраа Х, Y
В нашем случае она явно нарушена.
> Как снимали лунную аферу... [aФон#01.09.19 20:44]

roker2019> Деталей движений не видно.
Ну и? Это аргумент? Если да, то аргумент чего?
roker2019> Вы из себя тупого решили строить? С чего вы взяли, что вам для этого надо как-то особенно стараться?
Я задал тебе простые вопросы, а ты не ответил, но сделал выводы в другую сторону, не по существу. Не можешь ответить, но пытаешься уныло сострить. Так аферу не доказать.
roker2019> Маятник могли намеренно раскачивать, чтобы не бросилось в глаза слишком быстрое затухание.
Ух ты! А качество видео тут при чем? Чтоб механизм намеренно раскачки скрыть? И какого он размера этот механизм?
roker2019> Изучите контекст обсуждения.
Зачем? Ты утверждаешь. Я спрашиваю тебя о твоих утверждениях.
roker2019> Упругость троса, вес троса, силы трения в местах крепления и соприкосновения с перекладиной.
Какое отношение это имеет к качеству видео?
Ну и? Это аргумент? Если да, то аргумент чего?
roker2019> Вы из себя тупого решили строить? С чего вы взяли, что вам для этого надо как-то особенно стараться?
Я задал тебе простые вопросы, а ты не ответил, но сделал выводы в другую сторону, не по существу. Не можешь ответить, но пытаешься уныло сострить. Так аферу не доказать.
roker2019> Маятник могли намеренно раскачивать, чтобы не бросилось в глаза слишком быстрое затухание.
Ух ты! А качество видео тут при чем? Чтоб механизм намеренно раскачки скрыть? И какого он размера этот механизм?
roker2019> Изучите контекст обсуждения.
Зачем? Ты утверждаешь. Я спрашиваю тебя о твоих утверждениях.
roker2019> Упругость троса, вес троса, силы трения в местах крепления и соприкосновения с перекладиной.
Какое отношение это имеет к качеству видео?

P.V.> Ух ты! А качество видео тут при чем? Чтоб механизм намеренно раскачки скрыть? И какого он размера этот механизм?
Механизмом раскачки могут быть, например, человеческие руки.
P.V.> Зачем? Ты утверждаешь. Я спрашиваю тебя о твоих утверждениях.
Ответ на ваш вопрос вполне ясен из сообщения, в ответ на которое вы его написали.
roker2019>> Упругость троса, вес троса, силы трения в местах крепления и соприкосновения с перекладиной.
P.V.> Какое отношение это имеет к качеству видео?
Визуальной оценкой можно было бы лучше оценить все перечисленное. На видео такого убитого качества мы наблюдаем лишь очертания.
Да тут даже нельзя гарантировать что это не скомбинировано из нескольких разных видео. Такое убитое качество позволило бы скрыть комбинированные съемки.
Механизмом раскачки могут быть, например, человеческие руки.
P.V.> Зачем? Ты утверждаешь. Я спрашиваю тебя о твоих утверждениях.
Ответ на ваш вопрос вполне ясен из сообщения, в ответ на которое вы его написали.
roker2019>> Упругость троса, вес троса, силы трения в местах крепления и соприкосновения с перекладиной.
P.V.> Какое отношение это имеет к качеству видео?
Визуальной оценкой можно было бы лучше оценить все перечисленное. На видео такого убитого качества мы наблюдаем лишь очертания.
Да тут даже нельзя гарантировать что это не скомбинировано из нескольких разных видео. Такое убитое качество позволило бы скрыть комбинированные съемки.
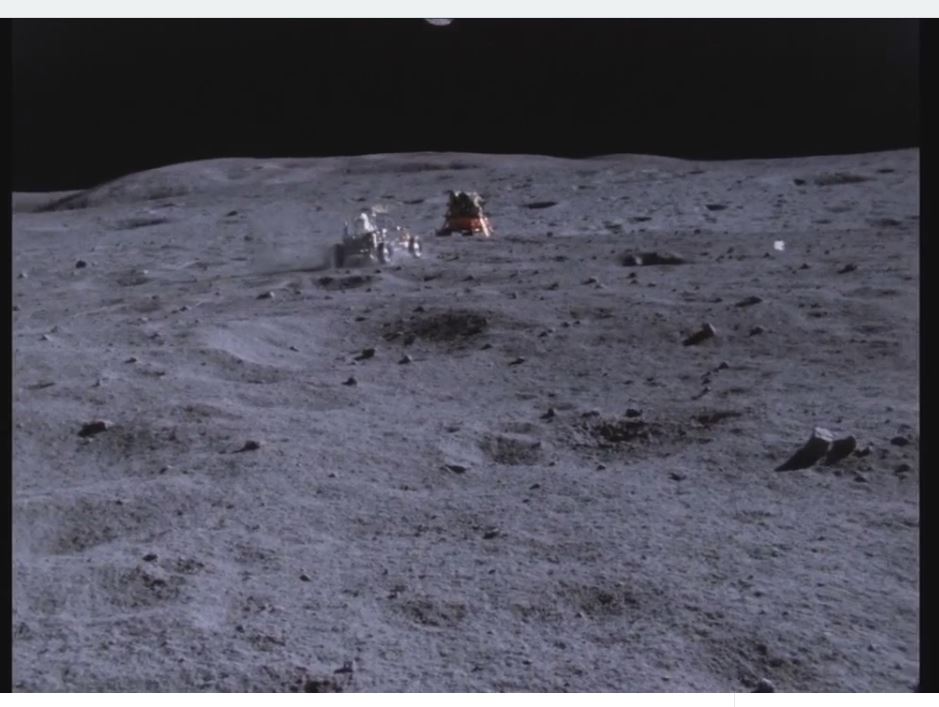
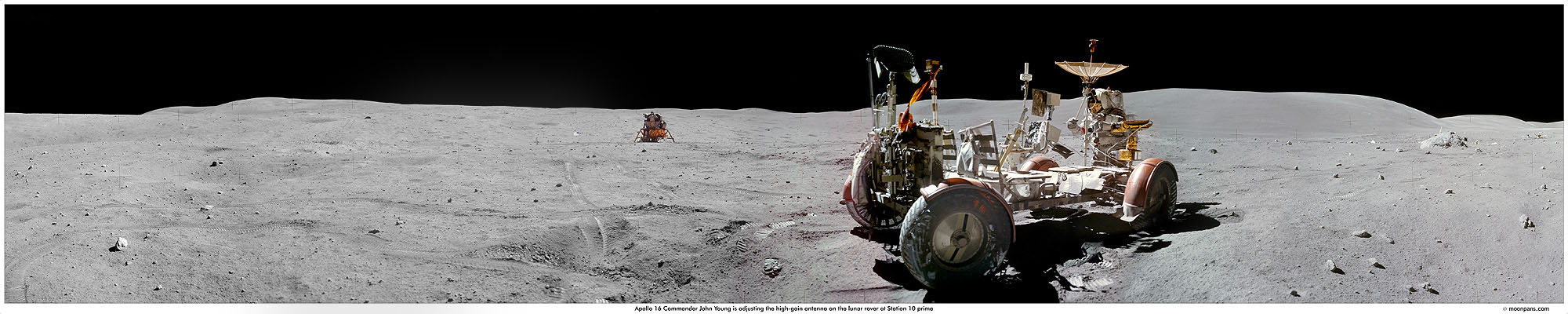
Забавно сравнить лунный модуль с панорамы
С макетиком лунного модуля, задействованного на съемках Grand Prix
Тонюсенькие ножки первого резко контрастируют ногами макетика, видимо, слепленного на скорую руку.
С макетиком лунного модуля, задействованного на съемках Grand Prix
Тонюсенькие ножки первого резко контрастируют ногами макетика, видимо, слепленного на скорую руку.
Это сообщение редактировалось 02.09.2019 в 20:42
Полезный ракурс, наша гора
Это сообщение редактировалось 02.09.2019 в 20:37
aФон>> Ну нарисуй руками, которые растут из передницы.
Hal> Мне то зачем? Специалисты уже всё нарисовали, написали статьи,
Никто ничего и не пытался рисовать, а первая же попытка выявила, что гора, которую мы видим на кадрах ролика, не влезает в обзор камеры, когда начинаешь работать по карте.
Я бы тоже не полез в эту область, если бы на анализе параллакса не увидел, что горы насыпаны рядом.
Ну а коли горы насыпные, то насыпали их по фоткам и можно было ожидать поймать ошибки в работе макетчиков, что мы тут же и увидели при попытке вписывания гор в угловой обзор камеры.
Hal> Мне то зачем? Специалисты уже всё нарисовали, написали статьи,
Никто ничего и не пытался рисовать, а первая же попытка выявила, что гора, которую мы видим на кадрах ролика, не влезает в обзор камеры, когда начинаешь работать по карте.
Я бы тоже не полез в эту область, если бы на анализе параллакса не увидел, что горы насыпаны рядом.
Ну а коли горы насыпные, то насыпали их по фоткам и можно было ожидать поймать ошибки в работе макетчиков, что мы тут же и увидели при попытке вписывания гор в угловой обзор камеры.

Tangaroa>> они всё сняли на Луне, тупая ты раковина
roker2019> Вы говорите о небольших кратерах на сниках ЛРО, которых якобы, нет на снимках Орбитера, но в ролике не показано сравнение и не видно, что действительно LRO видит то, чего не видел орбитер...
Так в чём же проблема? Бери снимки Орбитера, сравнивай, опровергай.
roker2019> Вы говорите о небольших кратерах на сниках ЛРО, которых якобы, нет на снимках Орбитера, но в ролике не показано сравнение и не видно, что действительно LRO видит то, чего не видел орбитер...
Так в чём же проблема? Бери снимки Орбитера, сравнивай, опровергай.
Tangaroa>> Даю подсказку: под угловым размером примерно в 1.1 градус будет виден 100-метровый кратер с дистанции около 5300 метров. На нужном угле (влево около 12..13 градусов от ЛМ, относительно точки съёмки) он такой один
aФон> Этот?
Нет, не этот. Тот, который виден, не закрыт ничем. А вот ты похож на двоечника, подсмотревшего ответ к задаче, которую он не в состоянии решить самостоятельно, и гадающего - "а если поделить на 2? Нет, лучше умножить на 3 и отнять 1"
aФон> Этот?
Нет, не этот. Тот, который виден, не закрыт ничем. А вот ты похож на двоечника, подсмотревшего ответ к задаче, которую он не в состоянии решить самостоятельно, и гадающего - "а если поделить на 2? Нет, лучше умножить на 3 и отнять 1"
aФон>> Этот?
Tangaroa> Нет, не этот. Тот, который виден, не закрыт ничем.
Этот?
Tangaroa> Нет, не этот. Тот, который виден, не закрыт ничем.
Этот?
Прикреплённые файлы:

rосker2019
новичок
Tangaroa> Так в чём же проблема? Бери снимки Орбитера, сравнивай, опровергай.
Нет, это ваша задача, приводить доказательства собственных утверждений.
Нет, это ваша задача, приводить доказательства собственных утверждений.
Tangaroa> А вот ты похож на двоечника, подсмотревшего ответ к задаче, которую он не в состоянии решить самостоятельно, и гадающего - "а если поделить на 2? Нет, лучше умножить на 3 и отнять 1"
Я, по наивности, ожидал, что гора впишется в кадр, поэтому кратер искал их соображений вписываемости горы, мне по-началу и в голову не пришло, что аферисты могут проколоться с размером насыпанной горы.
Я ожидал найти ошибки макетирования но не тут.
Я, по наивности, ожидал, что гора впишется в кадр, поэтому кратер искал их соображений вписываемости горы, мне по-началу и в голову не пришло, что аферисты могут проколоться с размером насыпанной горы.
Я ожидал найти ошибки макетирования но не тут.
Tangaroa>> А вот ты похож на двоечника, подсмотревшего ответ к задаче, которую он не в состоянии решить самостоятельно, и гадающего - "а если поделить на 2? Нет, лучше умножить на 3 и отнять 1"
aФон> Я, по наивности, ожидал, что гора впишется в кадр,
Гора прекрасно вписалась в кадр.
aФон> поэтому кратер искал их соображений вписываемости горы,
а надо было всего-то отмерить угол и посмотреть, что попадает на этот луч
aФон> аферисты могут проколоться с размером насыпанной горы.
ишь ты как, новая теория - теперь ещё и неправильный размер насыпанной горы? Жжошь, церетели.
aФон> Я, по наивности, ожидал, что гора впишется в кадр,
Гора прекрасно вписалась в кадр.
aФон> поэтому кратер искал их соображений вписываемости горы,
а надо было всего-то отмерить угол и посмотреть, что попадает на этот луч
aФон> аферисты могут проколоться с размером насыпанной горы.
ишь ты как, новая теория - теперь ещё и неправильный размер насыпанной горы? Жжошь, церетели.
Tangaroa>> Так в чём же проблема? Бери снимки Орбитера, сравнивай, опровергай.
rосker2019> Нет, это ваша задача, приводить доказательства собственных утверждений.
Sapienti sat. Если ты не в силах опровергнуть мои утверждения, то заткнись и не отсвечивай.
rосker2019> Нет, это ваша задача, приводить доказательства собственных утверждений.
Sapienti sat. Если ты не в силах опровергнуть мои утверждения, то заткнись и не отсвечивай.
Tangaroa> Гора прекрасно вписалась в кадр.
Нет, лунная гора больше, чем насыпано у аферистов
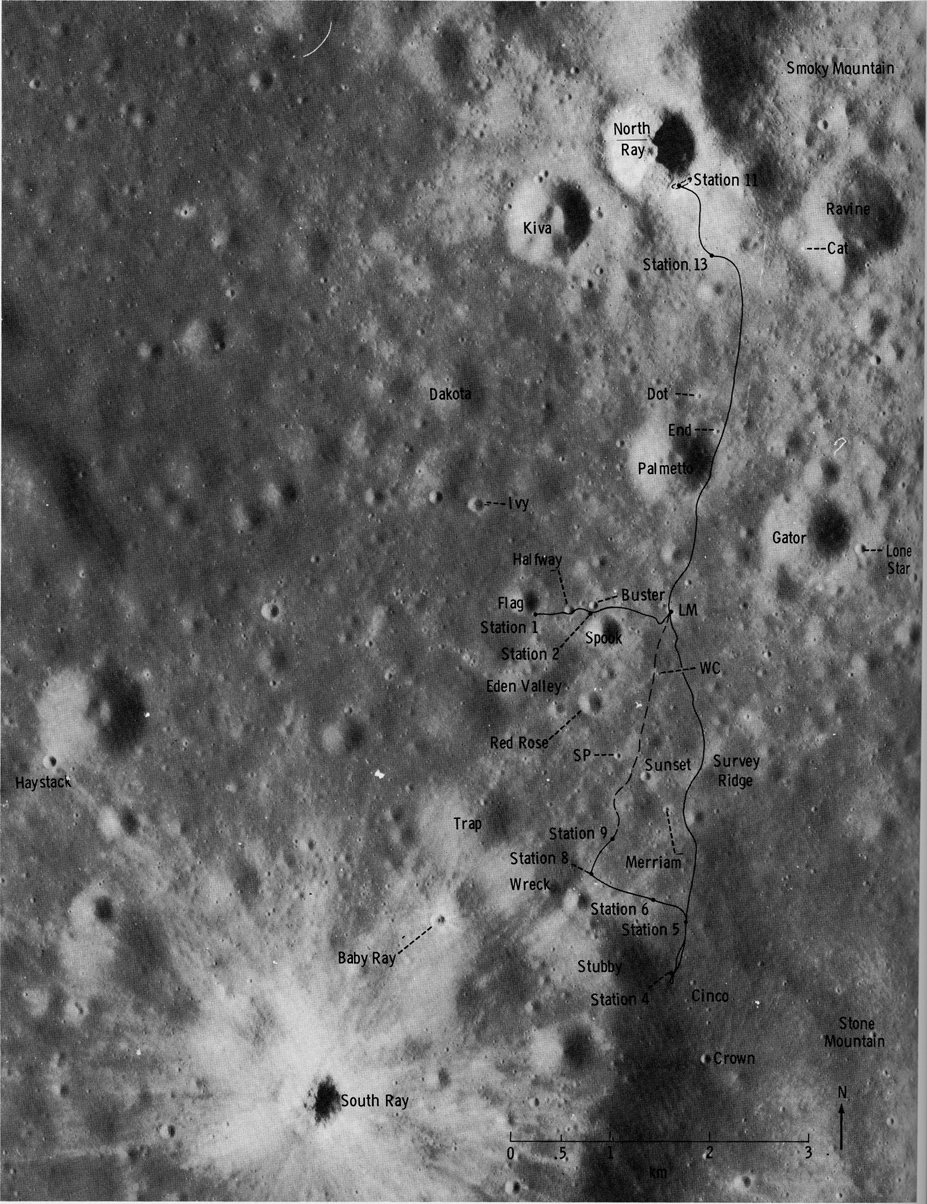
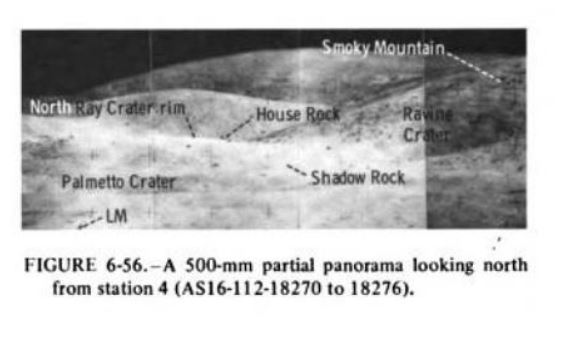
Видишь слева из-за горы выступает хребет?
Вот тут он подробно расписан:
Показан и кратер северный луч.
Так вот, камера его совершенно не захватывает, если центр упереть в характерный "изгиб" горы по центру кадра, напротив ЛМ
вот тут этот "изгиб" отлично виден
aФон>> поэтому кратер искал их соображений вписываемости горы,
Tangaroa> а надо было всего-то отмерить угол и посмотреть, что попадает на этот луч
Нет, так ничего не выйдет
1. Угол обзора у камеры существенно ниже в горизонтальной плоскости
2. Аферисты ошиблись с размером горы.
Tangaroa> ишь ты как, новая теория - теперь ещё и неправильный размер насыпанной горы?
Я сам не ожидал, что прокол у них в размере горы (как и не ожидал в свое время обнаружить параллакс)
Нет, лунная гора больше, чем насыпано у аферистов
Видишь слева из-за горы выступает хребет?
Вот тут он подробно расписан:
Показан и кратер северный луч.
Так вот, камера его совершенно не захватывает, если центр упереть в характерный "изгиб" горы по центру кадра, напротив ЛМ
вот тут этот "изгиб" отлично виден
aФон>> поэтому кратер искал их соображений вписываемости горы,
Tangaroa> а надо было всего-то отмерить угол и посмотреть, что попадает на этот луч
Нет, так ничего не выйдет
1. Угол обзора у камеры существенно ниже в горизонтальной плоскости
2. Аферисты ошиблись с размером горы.
Tangaroa> ишь ты как, новая теория - теперь ещё и неправильный размер насыпанной горы?
Я сам не ожидал, что прокол у них в размере горы (как и не ожидал в свое время обнаружить параллакс)
Это сообщение редактировалось 02.09.2019 в 22:09
roker2019> Да тут даже нельзя гарантировать что это не скомбинировано из нескольких разных видео. Такое убитое качество позволило бы скрыть комбинированные съемки.
Очень любопытно поглядеть на технологию комбинированных съёмок с таким качеством. Точнее - на каком этапе съёмок картинка была приведена в такое разрешение имитирующее теле трансляцию?
Так в чем смысл вообще делать имитацию с таким качеством, ведь задача аферистов убедить всех в реальности происходящего?
Очень любопытно поглядеть на технологию комбинированных съёмок с таким качеством. Точнее - на каком этапе съёмок картинка была приведена в такое разрешение имитирующее теле трансляцию?
Так в чем смысл вообще делать имитацию с таким качеством, ведь задача аферистов убедить всех в реальности происходящего?
aФон> Забавно сравнить лунный модуль с
Забавно смотреть как ты генерируешь бредятину
aФон> С макетиком лунного модуля, задействованного на съемках Grand Prix
Ну же Афон, роди хоть одно подозрение на то, что это макет. Хоть один объективный признак, а не кажимость.
aФон> Тонюсенькие ножки первого резко контрастируют ногами макетика, видимо, слепленного на скорую руку.
Только болван будет сравнивать детальные размеры объекта в разных условиях освещения при разном разрешении. Чем там "ноги" обернуты, майларом, да, Афон? И что же происходит с яркими бликами на глянцевой поверхности при относительно низком разрешении? А в тени?
Забавно смотреть как ты генерируешь бредятину
aФон> С макетиком лунного модуля, задействованного на съемках Grand Prix
Ну же Афон, роди хоть одно подозрение на то, что это макет. Хоть один объективный признак, а не кажимость.
aФон> Тонюсенькие ножки первого резко контрастируют ногами макетика, видимо, слепленного на скорую руку.
Только болван будет сравнивать детальные размеры объекта в разных условиях освещения при разном разрешении. Чем там "ноги" обернуты, майларом, да, Афон? И что же происходит с яркими бликами на глянцевой поверхности при относительно низком разрешении? А в тени?
Tangaroa>> а надо было всего-то отмерить угол и посмотреть, что попадает на этот луч
aФон> Нет, так ничего не выйдет
Именно так всё получится.
aФон> 1. Угол обзора у камеры существенно ниже в горизонтальной плоскости
ниже чем что? чем в вертикальной плоскости?
aФон> 2. Аферисты ошиблись с размером горы.
Аферисты, быть может, и ошиблись. Но на кино- и фотокадрах мы видим лунные горы совершенно правильных размеров и пропорций, со всеми их элементами. И ещё на снимках LRO мы видим следы и технику, оставленную экспедициями амеров более 50 лет назад. А ещё мы видим, что ты — сраный псих, отрицающий действительность.
Tangaroa>> ишь ты как, новая теория - теперь ещё и неправильный размер насыпанной горы?
aФон> Я сам не ожидал, что прокол у них в размере горы
Потому что у них нет прокола в размере гора, но ты его страстно хочешь видеть. Потому что ты сраный псих.
aФон> (как и не ожидал в свое время обнаружить параллакс)
потому что параллакс ты тоже не обнаружил, но обнаружил какие-то кривульки. Причина - см. выше.
aФон> Нет, так ничего не выйдет
Именно так всё получится.
aФон> 1. Угол обзора у камеры существенно ниже в горизонтальной плоскости
ниже чем что? чем в вертикальной плоскости?
aФон> 2. Аферисты ошиблись с размером горы.
Аферисты, быть может, и ошиблись. Но на кино- и фотокадрах мы видим лунные горы совершенно правильных размеров и пропорций, со всеми их элементами. И ещё на снимках LRO мы видим следы и технику, оставленную экспедициями амеров более 50 лет назад. А ещё мы видим, что ты — сраный псих, отрицающий действительность.
Tangaroa>> ишь ты как, новая теория - теперь ещё и неправильный размер насыпанной горы?
aФон> Я сам не ожидал, что прокол у них в размере горы
Потому что у них нет прокола в размере гора, но ты его страстно хочешь видеть. Потому что ты сраный псих.
aФон> (как и не ожидал в свое время обнаружить параллакс)
потому что параллакс ты тоже не обнаружил, но обнаружил какие-то кривульки. Причина - см. выше.
P.V.> Только болван будет сравнивать детальные размеры объекта в разных условиях освещения при разном разрешении. Чем там "ноги" обернуты, майларом, да, Афон? И что же происходит с яркими бликами на глянцевой поверхности при относительно низком разрешении? А в тени?
Вот полюбуйся на ноги в тени:
Вот полюбуйся на ноги в тени:
aФон>> 1. Угол обзора у камеры существенно ниже в горизонтальной плоскости
Tangaroa> ниже чем что? чем в вертикальной плоскости?
aФон>> 2. Аферисты ошиблись с размером горы.
Tangaroa> Аферисты, быть может, и ошиблись. Но на кино- и фотокадрах мы видим лунные горы совершенно правильных размеров и пропорций, со всеми их элементами.
Ты нарисуй угол камеры из точки, где она была и увидишь, что лунная гора ШИРЕ, чем на кадрах ролика у аферистов
Tangaroa> Потому что у них нет прокола в размере гора,
Ты рисовал?
aФон>> (как и не ожидал в свое время обнаружить параллакс)
Tangaroa> потому что параллакс ты тоже не обнаружил, но обнаружил какие-то кривульки.
Параллакс обнаружен и неполучить его по-честному, без жульничества никому не удалось, он неизменно вылезает.
Tangaroa> ниже чем что? чем в вертикальной плоскости?
tg(ω/2) = tg(54,9°/2)*cosψ (3)
То есть угол обзора камеры ω в горизонтальной плоскости, в которой мы и смотрим на карту, будет более узким (меньше 54,9°) и его можно найти по формуле 3.
Угол наклона камеры ψ легко определить по кадру из ролика.
> Apollo 16 LRV Grand Prix в вакуумной камере [aФон#02.09.19 01:45]
aФон>> 2. Аферисты ошиблись с размером горы.
Tangaroa> Аферисты, быть может, и ошиблись. Но на кино- и фотокадрах мы видим лунные горы совершенно правильных размеров и пропорций, со всеми их элементами.
Ты нарисуй угол камеры из точки, где она была и увидишь, что лунная гора ШИРЕ, чем на кадрах ролика у аферистов
Tangaroa> Потому что у них нет прокола в размере гора,
Ты рисовал?
aФон>> (как и не ожидал в свое время обнаружить параллакс)
Tangaroa> потому что параллакс ты тоже не обнаружил, но обнаружил какие-то кривульки.
Параллакс обнаружен и неполучить его по-честному, без жульничества никому не удалось, он неизменно вылезает.
Реклама Google — средство выживания форумов :)
aФон> aФон>> 2. Аферисты ошиблись с размером горы.
Tangaroa>> Аферисты, быть может, и ошиблись. Но на кино- и фотокадрах мы видим лунные горы совершенно правильных размеров и пропорций, со всеми их элементами.
aФон> Ты нарисуй угол камеры из точки, где она была и увидишь, что лунная гора ШИРЕ, чем на кадрах ролика у аферистов
AS16-113-18348
Tangaroa>> Потому что у них нет прокола в размере гора,
aФон> Ты рисовал?
AS16-113-18348
Поясню, а то ты слишком тупой, чтобы понять простые намёки: сравни вид (размеры, пропорции и всё такое) этой горы с кадрами Grand Prix. Если ты не ссыкло, конечно.
aФон> aФон>> (как и не ожидал в свое время обнаружить параллакс)
Tangaroa>> потому что параллакс ты тоже не обнаружил, но обнаружил какие-то кривульки.
aФон> Параллакс обнаружен
Проблема в том, что это хрень какая-то, а не параллакс.
aФон> и неполучить его по-честному, без жульничества никому не удалось, он неизменно вылезает.
проблема в том, что он у тебя вылезает только тогда, когда ты начинаешь вполне сознательно жульничать и мухлевать с фотографиями. Ты - аферист и мошенник.
Tangaroa>> Аферисты, быть может, и ошиблись. Но на кино- и фотокадрах мы видим лунные горы совершенно правильных размеров и пропорций, со всеми их элементами.
aФон> Ты нарисуй угол камеры из точки, где она была и увидишь, что лунная гора ШИРЕ, чем на кадрах ролика у аферистов
AS16-113-18348
Tangaroa>> Потому что у них нет прокола в размере гора,
aФон> Ты рисовал?
AS16-113-18348
Поясню, а то ты слишком тупой, чтобы понять простые намёки: сравни вид (размеры, пропорции и всё такое) этой горы с кадрами Grand Prix. Если ты не ссыкло, конечно.
aФон> aФон>> (как и не ожидал в свое время обнаружить параллакс)
Tangaroa>> потому что параллакс ты тоже не обнаружил, но обнаружил какие-то кривульки.
aФон> Параллакс обнаружен
Проблема в том, что это хрень какая-то, а не параллакс.
aФон> и неполучить его по-честному, без жульничества никому не удалось, он неизменно вылезает.
проблема в том, что он у тебя вылезает только тогда, когда ты начинаешь вполне сознательно жульничать и мухлевать с фотографиями. Ты - аферист и мошенник.
Это сообщение редактировалось 03.09.2019 в 00:59
Copyright © Balancer 1997..2023
Создано 27.08.2019
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 27.08.2019
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}