-
apakhom: Все сообщения за 17 Ноября 2020 года
| Пн | Вт | Ср | Чт | Пт | Сб | Вс |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |


Но у тебя же красивая кривая скорости по MPU получилась. Алгоритм: считаем интеграл прямо на борту и как только скорость в ноль - даем команду на срабатывание ССР.
Для сравнения - и по данным MFR тоже неплохой результат. Чуть позднее (но это можно подкорректировать в коэффициентах MFR - есть у pinko такая возможность) - но тоже в ноль.


 инфо
инфо инструменты
инструменты
SashaMaks> Очень похоже на отклонённый вектор тяги.
SashaMaks> Можешь детально сфотографировать двигатель и особенно его сопловый блок в разобранном виде?
Фото двигателя (правда не распиленного) - на сайте (там пока все в куче, еще не разбирал). Там действительно "сильное подкопчение" с одной стороны. Но мне кажется это при запуске - на видео зажигания видно отклонение пламени именно в эту сторону.
На оранжевую (N) смотреть не надо - это корень из xx+yy+zz. X-синий (45* от вертикали), Y-красный (-45* от вертикали), Z-желтый (перпендикулярно корпусу).
У pinko MFR: X - вертикаль, Y,Z - перпендикуляры корпусу.
До мастерства монтажа pinko мне далеко
")
MFR - красненький модуль

Место под MPU6050 изначально не было предусмотрено, поэтому сделано так:
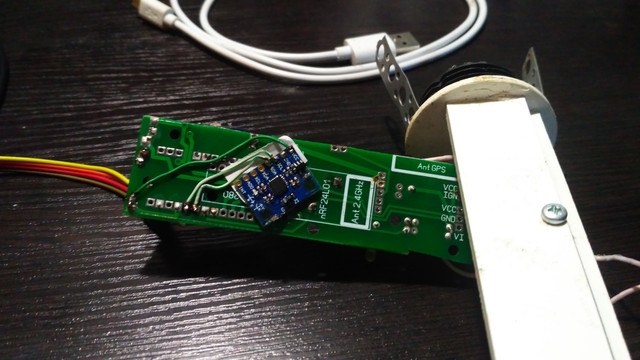
модуль запаян на основной плате через контакт GND и приклеен термоклеем. Основная плата крепится к основанию винтом М3.
Общая компоновка такая:

Тут "старое" фото, еще без MFR - в нижней части.
Потому что сумма квадратов всегда больше нуля
SashaMax об этом и писал, что надо знак "ловить".
Copyright © Balancer 1997..2024
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
