-
termostat: Все сообщения за 25 Августа 2009 года
| Пн | Вт | Ср | Чт | Пт | Сб | Вс |
|---|---|---|---|---|---|---|
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| 31 |


2. Назначение и принцип действия портов PD4, PD5 ? Лучше называть их пинмаи или выводами.
PD4 и PD5 это выходы ШИМ сигнала Y и X. А выводы PB0,1,2,3 блокируют через резисторы 56 ом прохождение ШИМ туда куда не надо.
Non-conformist> 3. Куда подключены резисторы портов PA5, PA6, PA7 ?
К выходам датчиков X Y и напряжение "средней точки" для датчиков - V
Non-conformist> 4. Куда подключены свободные порты МК? Висят в воздухе?
Да. Я обычно гребенку штырьков паяю на плату чтоб можно было подключиться при надобности без пайки.
Non-conformist> 5. Назначение конденсаторов C10 .. C17?
Они с резисторами образуют RC фильтры НЧ перед каналами АЦП.
Non-conformist> 6. Назначение LED1?
Универсальный индикатор, для индикации или для отладки. Всегда ставлю на плату - удобно.
Non-conformist> 7. Нзначение S1?
Наверно управлять запоминанием настроек в EEPROM и загрузкой возможно. "Менюшка" может и на ПК высвечиваться а просту команду дать можно и кнопочкой. Можно кнопок добавить на PORTC.
Схема -

=========
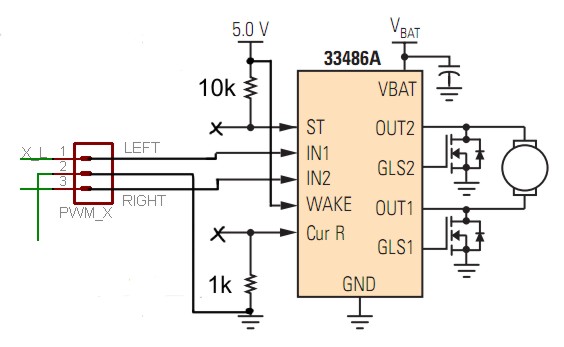
Начерти, пожалуйста, КОНКРЕТНУЮ схему подключения драйвера 33486 к Меге32-TQFP44?
Щас занят чуток, но мега32 абсолютно идентична меге16 по выводам - так что по названиям аналогично подключать.
Только я советую DIP и в панельку. Это удобней и размер нормальный. Вот серво контроллер на 24 servo

МК в панельке. Значит можно легко поменять испорченый или поставить ATmega16 ATmega32 ATmega644 ( у последней еще и прерывания на всех ногах почти). Под МК кварц блокировочные конденсаторы и стабилитрон по питанию.


Это сообщение редактировалось 25.08.2009 в 17:59
 инфо
инфо инструменты
инструменты
Вот схема подключения драйвера электро моторов mc33486 к ПИД контроллеру на ATmega16 схема которого выше. Но в Меге32-TQFP44 такие же названия НУЖНЫХ ножек как и в DIP.
Copyright © Balancer 1997..2024
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
