-
Serg Ivanov: Все сообщения за 09 Июля 2020 года
| Пн | Вт | Ср | Чт | Пт | Сб | Вс |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |



Турция «зализывает рану» в Ливии: за «Панцири» отомстили на «Ястребах»: EADaily
После короткой передышки военное противостояние между Ливийской национальной армией (ЛНА) маршала Халифы Хафтара и поддерживаемым Турцией Правительством национального согласия (ПНС) под руководством Фаиза Сараджа вновь вступило в активную фазу. // eadaily.com5 июля, когда, предположительно, авиация ЛНА нанесла несколько точечных ударов по находящейся под управлением Турции авиабазе «Аль-Ватия» в западной части Ливии, в 140 километрах к югу от Триполи.
Согласно данным военных источников, в результате были уничтожены размещённые на военно-воздушном объекте турецкие зенитные ракетные комплексы MIM-23 Hawk («Ястреб») американского производства, несколько радаров и система радиоэлектронной борьбы KORAL. Турецкие государственные СМИ подтвердили атаку и значительный ущерб после авианалёта, выдвинув в основные версию о том, что удары «на самом деле были нанесены самолётами Объединённых Арабских Эмиратов, взлетевших с базы „Сиди-Баррани“ в Египте». В связи с этим делаются прозрачные намёки на то, что таким образом Эмираты отомстили за потерю в середине мая как самой базы «Аль-Ватия», бывшей под контролем войск Хафтара, так и находившихся на ней зенитных ракетно-пушечных комплексов «Панцирь-С1» российского производства, поставленных арабской монархией ливийскому маршалу.
Подробнее: Турция «зализывает рану» в Ливии: за «Панцири» отомстили на «Ястребах» — Новости политики, Новости России — EADaily
Опять ПВО бьют.. Неладно что-то в датском королевстве.


 инфо
инфо инструменты
инструменты
Ну да вот так

- если весит тонн 20.
А на полтонны и 40-50 кг ракет можно и попроще.

Размер имеет значение. Грубо - если масса БПЛА в 40 раз меньше массы истребителя с ЭПР 5 кв.м, то его линейные размеры будут меньше в 400.33=3,4 раза. А площадь отражающей поверхности будет меньше в 3,42=12 раз. 5кв.м/12= 0,4 кв.м. Использование композитов типа стеклопластика ещё больше снизит ЭПР. Ну и пара 20 кг ракет на подвеске не сильно добавят заметности.
Это сообщение редактировалось 09.07.2020 в 18:52
Странный вопрос. Откуда мне знать и какое это имеет значение если даны параметры бортовой РЛС?
Полл> Можно узнать параметры бортовой РЛС БЛА "Байрактар"?
Можно ссылки читать?
Что касается применения Bayraktar в варианте с РЛС, то тут имеется ряд преимуществ перед ОЛС. РЛС сканирует рельеф с высоким разрешением, и обычная маскировка, дым, облака и пр. для неё не помеха. На Bayraktar, конечно, можно разместить только мини-РЛС с АФАР вроде французской Picosar от «Леонардо», которую активно экспортируют. Дальность сканирования с разрешением в 1 м — 20 км. С разрешением в 0,3 м, когда она гарантированно засечет «Панцирь», Picosar сканирует на расстояние до 14 км.

Противостояние ЗРК «Панцирь-С1» и турецких БПЛА: репетиция войн будущего
Во время недавних боёв в Идлибе и сейчас в Ливии исход сражений часто решался в противостоянии российских ЗРК и турецких беспилотников. Полной картины этих событий у нас нет, но по отдельным фрагментам доступной информации можно сделать выводы о том, что борьба велась с большим напряжением и // topwar.ruНу и собственно аппаратура РТР на БПЛА работающую РЛС Панциря тоже заметит.
Полл> Тебе уже в этой теме два раза прозрачно намекнули, что "Байрактар" данную РЛС не потянет по питанию.
Да неужели и как же я не догадался?


О разработке малоразмерных разведывательных БПЛА компанией Selex
В журнале Armada International опубликованы некоторые данные о новых малоразмерных разведывательных беспилотных летательных аппаратах (БПЛА), разрабатываемых компанией Selex Sensor and Airborne S... // militaryarticle.ruЛС PicoSAR была впервые показана в феврале 2006 г. на авиакосмическом салоне Asian Aerospace. Станция оснащена активной антенной решеткой с электронным сканированием (AESA) и работает в X диапазоне частот. Масса станции составляет 10 кг, высота - 230 мм, ширина - 330 мм, глубина - 160 мм; зона сканирования -+ 45°, максимальная дальность действия - 20 км, напряжение источника питания - 28 В постоянного тока, потребляемая мощность - 300 Вт.
РЛС PicoSAR может работать в трех режимах: картографирования местности (Strip SAR), детальной съемки объектов (Spotlight SAR) и индикации наземных движущихся целей (GMTI). В режиме детальной съемки объектов разрешающая способность получаемых изображений - менее 1 м2.
Конструктивно РЛС состоит из одного небольшого быстросменного блока (LRU), который для облегчения установки может быть разделен на две части: первая -антенна и блок инерциальных измерений (IMU) и вторая - процессор и плата GPS.
Главной конструктивной особенностью РЛС является использование технологии активной антенной решетки в малогабаритной аппаратуре. Кроме того, использование в решетке множества твердотельных приемопередающих модулей делает PicoSAR (средняя наработка на отказ превышает 1 000 ч) более надежной по сравнению с обычными РЛС.
Летные испытания РЛС PicoSAR, установленной на БПЛА, планируется провести в 2008 г.
Мотор в 100 л.с. не отдаст 300 Вт? Причём вместо ОЛС которую тоже надо питать..
S.I.>> Ну и собственно аппаратура РТР на БПЛА работающую РЛС Панциря тоже
Полл> У "Байрактара" на борту нет аппаратуры РТР.
Мамой клянёшься? Землю есть будешь?
")
Или пустой трёп как выше? Не надо тупых намёков, надо ссылки прилагать.
PicoSAR - это сверхлегкий SAR, основанный на технологии активной антенной решетки. Полная система, включающая генерацию сигнала, 2-канальный приемник, инерциальный измерительный блок, обработку сигналов в реальном времени и компенсацию движения, размещена в компактном блоке весом менее 10 кг, который можно легко установить на широкий спектр самолетов. Система обеспечивает отличные рабочие характеристики: дальность свыше 20 км и разрешение до 0,3 м. В статье описаны ключевые технологии системы и приведены примеры производительности системы.

Это сообщение редактировалось 09.07.2020 в 18:42
Оператор посадит. Глазками снаружи.
Нет. По дальности действия и разрешающей способности. Читай о РЛС бокового обзора с синтезированной апертурой антенны - поймёшь, что мощность не слишком важна в данном случае.
Полл> Так сажать БЛА у кого-то в мире постоянно получается?
Да, у всех. Кончай замусоривать тему своим невежеством.
Полл> Примеры, пожалуйста, тяжелых БЛА
Спасибо. БПЛА легкий.
Полл> Полл>> Примеры, пожалуйста, тяжелых БЛА
S.I.>> Спасибо. БПЛА легкий.
Полл> 20, максимум 40 кг, как авиамодели с горизонтальной посадкой, которые операторам удается так посадить?
Полл> Да и то далеко не всегда.
Где здесь видиокамера?



Уничтожить оператора, а не беспилотник: израильское видение борьбы с БПЛА
Исследователи из Университета Бен-Гуриона в израильском Негеве, специализирующиеся на кибертехнологиях, создали алгоритмы для определения местоположения операторов беспилотников. Ключом к их поиску является траектория полета дрона.Соответствующий доклад был представлен 3 июля. Разработчики новой // topwar.ruИсследователи из Университета Бен-Гуриона в израильском Негеве, специализирующиеся на кибертехнологиях, создали алгоритмы для определения местоположения операторов беспилотников. Ключом к их поиску является траектория полета дрона.
В ходе проведения тестов модель смогла предсказать местоположение оператора с точностью в 78%.
Новая технология может проявить себя и на поле боя. Например, вместо того, чтобы в авральном режиме бороться со стаей мелких дронов, достаточно вычислить местоположение пункта управления ими и уничтожить оператора.
Gasilov> Форма в большей степени имеет значение.
Естественно - достаточно посмотреть на хвостовое оперение, что бы понять что и это тоже учитывалось:

Видимо это всем известно кроме тебя..

Но она не всегда устанавливается.
мешает она РЛС и не нужна в плохую погоду.
Для посадки вообще не нужна:

Российскую систему автоматической посадки испытают на американском беспилотнике
В ЦНИИ автоматика и гидравлики (ЦНИИАГ) разработали систему автоматической посадки беспилотников самолетного типа. Летные испытания планируют провести уже в этом году. По результатам тестирования возможны поставки на российский рынок в качестве основной системы приземления БПЛА с горизонтальной посадкой. // xn-b1aga5aadd.xn-p1aiПрограммно-аппаратный комплекс, созданный Центральным научно-исследовательским институтом автоматики и гидравлики, состоит из двух компонентов: наземного радиомодуля и бортового приемника, подключаемого к системам управления БПЛА. Информация о характеристиках полета беспилотника передается на радиомодуль, расположенный на земле. Он же, в свою очередь, отправляет данные о положении БПЛА относительно места посадки. Бортовой приемник, учитывая полученную информацию, подбирает оптимальный режим посадки.
Параллельно систему посадки для беспилотников министерства обороны создает АО "Кронштадт". В компании отказались давать комментарии о ходе разработки. Американские БПЛА MALE-класса семейства "Predator" и израильские семейств Heron и Searcher уже оснащены подобными системами.
2017 год.
Это сообщение редактировалось 09.07.2020 в 21:08
Полл:
предупреждение (+2) по категории «Категоричное сомнительное заявление, не подтверждённое фактом [п.11] »
Чушь. За один проход. Когерентно, с учётом фазы сигнала за несколько проходов никак не получится.
Почитай Комаров А.А., Кондратенков Г.С., Курилов Н.Н. и др. Радиолокационные станции воздушной разведки / Под ред. Кондратенкова Г.С. — М.: Воениздат, 1983. — 152 с., ил.
Достаточно понятно объясняется.
Есть в сети.
Полл:
предупреждение (+2) по категории «Категоричное сомнительное заявление, не подтверждённое фактом [п.11] »

«Колоссальный прорыв»: российские учёные разработали новый способ обнаружения самолётов-невидимок
В России разработан новый метод селекции движущихся объектов, изготовленных по технологии «стелс». Как сообщили в Радиотехническом институте имени академика А.Л. Минца, он позволяет фиксировать так называемую радиолокационную тень, которую оставляет на экране радара самолёт-невидимка. По словам экспертов, сегодняшние локаторы не всегда могут своевременно обнаружить подобную цель. В связи с этим изобретение российских специалистов имеет большое значение для укрепления противовоздушной обороны страны, указывают аналитики. // russian.rt.comРоссийские специалисты представили новый способ обнаружения движущихся объектов, изготовленных по стелс-технологии. Об этом сообщили в пресс-службе АО «Радиотехнический институт имени академика А.Л. Минца». В основу метода положен анализ радиолокационной тени наблюдаемого объекта.
«В рамках разработки нового способа в АО РТИ провели оценку возможности использования анализа радиолокационной тени методом синтезирования апертуры движущихся объектов, возникающих на этапе картографирования местности», — говорится в материале института.
Отмечается, что инженерам Института имени Минца совместно со специалистами других учреждений и предприятий удалось создать новую модель расчёта радиолокационной тени, учитывающую скорость и параметры полёта летательного аппарата.
радиолокационной тенью принято считать тёмное пятно на экране радара, где изображена карта местности. Оператор РЛС понимает, что станция зафиксировала цель, рассеивающую и поглощающую радиоволны. Применительно к противовоздушной обороне это самолёт-невидимка.
«Сейчас всё-таки рано говорить о скором практическом воплощении нового способа селекции движущихся объектов. На сегодняшний день доказано, что он возможен теоретически. Впереди ещё много работы. Думаю, потребуется порядка семи лет. Но если всё сложится удачно, то данный способ предоставит России заметное преимущество на поле боя», — сказал Денисенцев.
Юрий Кнутов полагает, что учёные непременно доведут изобретение до практической реализации, так как в этом наверняка заинтересованы военные. По оценке аналитика, новый способ селекции движущихся объектов практически на 100% гарантирует фиксацию аппаратов, построенных по стелс-технологии, на дальних расстояниях.
«На мой взгляд, это колоссальный прорыв, который позволяет отображать на экране так называемые невидимки. Важно, что с помощью синтезированной апертуры учёные смогли снизить уровень ошибок пеленгации. В итоге разработан принцип радиолокации, который обнаружит любую тень, а компьютер рассчитает её точное местоположение, что даст возможность силам ПВО принять своевременное решение о противодействии»
ttt> Обнаружить стелс на фоне земли - да запросто
Как минимум - его радиолокационную тень на Земле..
Это сообщение редактировалось 09.07.2020 в 22:11
Udaff> Т.е. сейчас и в ближайшее время РЛС у Байрактов нет. Преимущества по обнаружению перед Панцирем нет и в ближайшее время не будет. При этом Панцирь СМ с ракетами дальностью до 40 км уже есть.
Все хорошо, прекрасная маркиза,
И хороши у нас дела,
Ни одного печального сюрприза,
За исключением пустяка:

Минобороны России подтвердило потерю большого количества ЗРПК "Панцирь-С" в Ливии и Сирии
СМИ Минобороны России подтвердили большие потери ЗРПК «Панцирь-С» в Ливии и Сирии // avia.pro«Согласно официальным ТТХ «Панцирь-С1», станция обнаружения целей имеет зону обзора: по азимуту 360°, по углу места 0-60° или 40-80°. Это говорит о наличии значительной «мёртвой воронки» в первом случае - 60°. Во втором случае «мёртвая зона» составляет 10° и 20°. Суммарно «мёртвая воронка» во втором случае составит 40°. Есть разные способы прорыва в невидимую для РЛС «мёртвую зону» как на малых, так на средних, а также на больших высотах, в том числе на минимальной высоте и максимальной скорости, либо на максимально большой высоте и максимальной скорости. <...> Приведённая выше цитата из авторитетного источника, подготовленного Министерством обороны России и заводами-изготовителями техники ПВО, говорит о том, что ЗРПК «Панцирь-С1» отлично видит цели с ЭОП от 0,03 м². Учитывая значительные размеры турецкого БПЛА «Bayraktar TB2», а его длина составляет 6,5 м, размах крыльев - 12 м, эффективная отражающая поверхность у этого дрона позволяет «Панцирю» как увидеть его, так и, соответственно, нанести по нему удар», - сообщает российский еженедельник «Звезда».

«Геноцид» российских «Панцирей» объяснили «мертвой воронкой»
«Геноцид» зенитного ракетно-пушечного комплекса (ЗРПК) «Панцирь-С1» российского производства в Сирии и Ливии можно объяснить существованием «мертвой воронки» («мертвой зоны»), пишет «Звезда». Согласно еженедельнику, соответствующая станция обнаружения целей имеет ограничения по зоне обзора. // lenta.ruGasilov> Давайте попытаемся разобраться в журналистских вбросах.
Gasilov> Что бы воспользоваться мертвой воронкой, надо либо иметь большую высоту и поверх в нее влететь, дальше пикирование или сброс. Либо не влетая в зону с кабрирования или как то иначе забросить по баллистической траектории что то в эту воронку.
Gasilov> Или ЭТО слепая обзорная зона? И на индикаторах мы не видим летательный аппарат по причине какой то фильтрации.
Gasilov> Или это воздействие средств РЭБ?
Gasilov> Какие есть мнения?
Gasilov> Версии :уничтожили на марше, в местах хранения, при перезарядке, перенасытили канальность и пр. не обсуждаем.
Это сообщение редактировалось 09.07.2020 в 23:22
Полл> Первая космическая, грубо - 8000 м/с. Скорости самолетов - 100-1000 м/с так же грубо. Даже малые 200 м/с - это 2,5% скорости. Отличен, отличен самолет будет.
Самолёт для спутника мало отличен от автомобиля для самолёта:
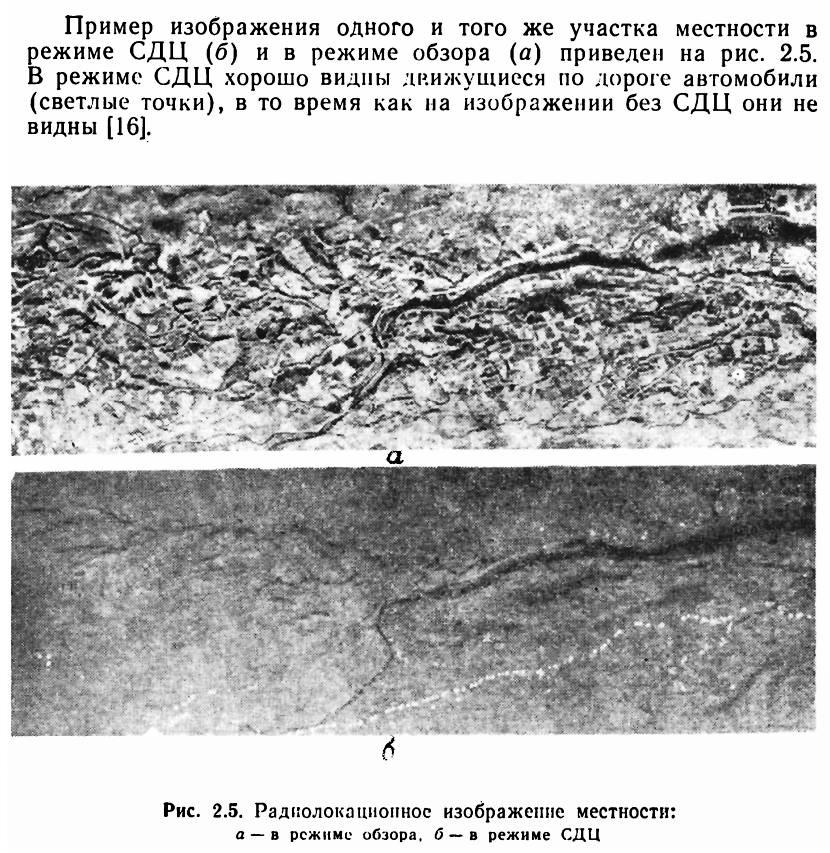
Выделение движущихся целей выполняется сравнением отраженных сигналов в двух следующих друг за другом периодах повторения. Сигналы, совпадающие по фазе, соответствуют неподвижным целям и поступают на индикатор неподвижных целей. Последовательность несовпадающих по фазе импульсов подается на индикатор движущихся целей. РФА типа AN/APS-94C позволяет селектировать цели, движущиеся со скоростью более 5 км/ч. Для реализации принципа СДЦ используются стабильный по частоте передатчик и когерентная обработка сигнала, что усложняет аппаратуру.
Copyright © Balancer 1997..2024
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}