-
termostat: Все сообщения за 12 Ноября 2008 года
| Пн | Вт | Ср | Чт | Пт | Сб | Вс |
|---|---|---|---|---|---|---|
| 1 | 2 | |||||
| 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 24 | 25 | 26 | 27 | 28 | 29 | 30 |


Причем уперется он может уже и при 70% ШИМ (с серединой 50%) и если МК не знает что уже упор достигнут то "ПИД" будет и дальше ТУПО добавлять ШИМ и увеличивать интеграл и т.п.
Non-conformist> В указанное место вала электродвигателя посадить перфорированное мышиное колесо с комплектной оптопарой. Будет ли сигнал с такого датчика достаточно информативным для поставленной задачи? Легко ли будет его обработать микроконтроллеру?
Да и да. Только нужно будет мотор "колбаснуть" до обоих упоров чтоб МК запомнил отсчеты максимальных отклонений и знал где центр - это ведь энкодер относительный будет.
Non-conformist> попытаться затулить в активатор датчик положения штока.
По-моему проще взять переменный резистор ползунковый с длиной хода больше чем ход актуатора. Крепить резистор можно и на удалении от актцатора - а ползунок свзяать металической спицей-тягой со штоком актуатора.
Можно и на крутящийся переменник поставить рычажок и тягой соединить с актуатором.
Решений - куча.


 инфо
инфо инструменты
инструменты
А при нелинейных сигналах и таблично можно преобразовывать сигналы датчиков.
Так сервы качают мотор не мешая друг другу.
Я смоделировал без коленок просто поставив ручку на стол вертикально и пальцами двух рук как вилками -все работает нормально. Что им броться то ? ТАК работали джойстики раньше - только штырь крутил вилки на крутилках переменников. Кулисный механизм.
У нас сервы 3003 стоят 13 баксов в розницу, БУ рабочие на форуме моделистов 3-6 баксов.
Но я не против энкодеров - они влезут в актуатор ?
Это сообщение редактировалось 12.11.2008 в 13:02
О.К.
Ты наверно про вилки где паз по радиусу идет ?
А я про вилки у каторых паз по образующей цилиндра ! Т.е. паз в моей схеме не в плоскости движеться а по поверхности цилиндра.
Представь: дно цилиндрич стакана ты прикрутил к оси сервы а в стенке стакана сделал паз параллельный оси цилиндра и сервы.
Два паза в движении образуют перекрещивающиеся цилиндры (только части их) оси которых на разной высоте находятся, и отношение радиуса цилиндра к расстоянию от его поверхности до центра качания мотора одинаково для обоих.
Вот тебе пример из карбюратора К126 - деталь 35 с пазом и есть кулиса, паз может быть и открытым - все равно это будет кулиса и штырь

Infineon Incorporates Nobel Prize-Winning Technology into its Sensors - Infineon Technologies
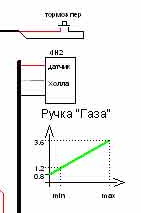
// www.infineon.comРучки "газа" на электровелосипедах тоже на магните и датчике холла.
Но я боюсь что все в экспериментах погрязнет.
Я понял что именно линейно. комплекты Hulong - вод график.
Даяж и грю. Очевидное решение. А спица-шток не даст ползунку качаться если у штока сделать кольцо на конце которое одевается на ползунок и это место термоклеем покрыть - он немного податлив - достаточно для малого изменения угла тяги при движении актуаторов.
Система то работать секунды будет - на 50 пусков хватит наверняка. лавное чтоб по ходу была свобода - чтоб упоров не было.
Вот полно переменников с параметрами и рисунками
http://www.bourns.ru/components_panelcontrols.php
Главное с линейной характеристикой брать.
Copyright © Balancer 1997..2024
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
